Microsoft PowerPoint - CT Ch 7 v2 21
|
|
|
- נתן חג'אזי
- לפני2 שנים
- צפיות:
תמליל

1 תורת הבקרה (35188) פרק 7. ז. הפקולטה להנדסת מכונות הטכניון מכון טכנולוגי לישראל 1
2 פרק 7. בקרה במרחב המצב משוב מצב תוספת אנטגרטורים והיזון קדימה שיקולי תכן משערכי מצב והפרעות בקרה מבוססת משערך- משפט ההפרדה בקרה מבוססת משערך פתרון בתדר
3 r u x Ax Bu x y C f r - F ìï x = Ax+ Bu í ï ïî y= Cx n m r x Î ;u Î ;yî משוב מצב התהליך: ( mxn FÎ ) u= frr-fx x = (A- BF)x+ Bfr r y= Cx חוק הבקרה - משוב מצב: משוואת מצב החוג הסגור עם משוב מצב: מטריצת A של החוג הסגור: A A-BF c 3
4 r f r - u - ( ) 1 si-a B C F x y :y r משוב מצב תמסורת החוג הסגור מ ל u = f r-f(si-a) Bu u = (I+ F(sI-A) B) f r r y(s) = T(s) r( s) = C(s I- A+ BF) -1 Bf r( s) r r n - + = - c º =å det(si A BF) det(si A ) p(s) p s משואה אפיינית ח"ס: משפט: באם (A,B) קונטרולבילי אזי קיים F הממקם קטבי החוג הסגור באופן רצוני. i i נראה בהמשך כי משוב מצב אינו מזיז את אפסי החוג הפתוח. ניתן להראות הזהות (I+ F(sI- A) B) = I-F(sI-A ) B c הערות: 1) ( 4
5 r f r - u - ( si-a) 1 B x C F y משוב מצב -חישוב נוסחת אקרמן :(SISO) רצוי של החוג הסגור ו C מטריצת הקונטרולביליות. כאשר p(s) פולינום אופייני 1 f = (,,...,1) C - p(a) נתון דוגמה: הקטבים ב 1-. מצאו משוב מצב הממקם æ 1ö æö x= x u + ç 1 è ø çè ø y= 1 x P(s) = ( ) 1 s : f = æ ö - (,1) C p(a) = (,1) (A A I ) (1,) ç 1 çè ø + + = ב MATLAB קיימות שתי פקודות למציאת משוב מצב: 1) acker(a,b,j) f = כאשר J וקטור שורה עם הקטבים הרצויים של החוג הסגור ( J = [ μ μ μ ] 1 n f = place(a,b,j) - acker רק למערכות - place,siso גם ל MIMO (מיקום רובסטי מיזעור רגישות הקטבים לפרטובציות ב A וב B) 5
6 נוסחת אקרמן שלבי הוכחה א. נתונים שני מימושים מינימליים של אותה מערכת: כאשר:. הוכיחו כי כאשר ו מטריצות הקונטרולביליות בהתאמה. ב. 1. אם הינה מטריצת המערכת במימוש מלווה הוכיחו כי: כאשר במקום ה של שני המימושים 1) x Ax Bu; ) x Ax Bu x,x. ec e 1 ( n i 1 1 x Tx; A T AT; B=T B C היא מטריצת הקונט' במימוש המלווה. הראו כי C T n CC 1 nxn A i eia ei+1e 1A (i=1,...,n-1) 1 ) e 1 i C. : u ג. 1. נסמן המשואה האופיינית של החוג הפתוח: det(si- A) = s + a s +...a s+ a f x n n-1 n-1 1 נסמן המשואה האופיינית של החוג הסגור עם משוב המצב 6
7 p s si A נוסחת אקרמן שלבי הוכחה (המשך ג) הראו כי:. הוכיחו כי: ד. הראו כי משוב המצב f המביא לאותו פולינום אופיני המלווה נתון ע"י כאשר ה. על בסיס סעיף ד ושימוש בסעיפים הקודמים הראו כי מתקבלת נוסחת אקרמן הערה: כל הגדלים מתיחסים כמו בצורה det(si- A + bf ) º p(s) = s + p s +...p s+ p T 1 CC n n-1 n-1 1 p a p1 a1 f p a pn1 an1 n f =e p(a) ו p(a) fa 1 i i1 1 f = (,,...,1) C - p(a) x Ax bu למימוש המלווה: i 1 1 f =e1t p(a) x 7
8 דוגמה נתונה מערכת של שני מיכלים כבציור: כאשר: ספיקות; הספיקה הנכנסת גבהי הנוזל התנגדות לזרימה שטח חתך כל מיכל (אות הבקרה) q 1 q i h i R i σ 8
9 דוגמה - מידול q 1 דוגמה (המשך) מודל ליניארי עם כאות בקרה נתון ע"י: h1 ( s) P1 ( s) = q ( s ) 1 תמסורות: h( s) P ( s) = q ( s ) 1 9
10 דוגמה משוב מצב מטריצת הקונטרולביליות: C ולכן C -1 f ( ) pa ξωn ωn נבחר את פולינום החוג הסגור כ: s+ ps ( ) = s + לפי אקרמן: p. שני ההגברים גדלים עם ω n תורת הבקרה פרק 7 1
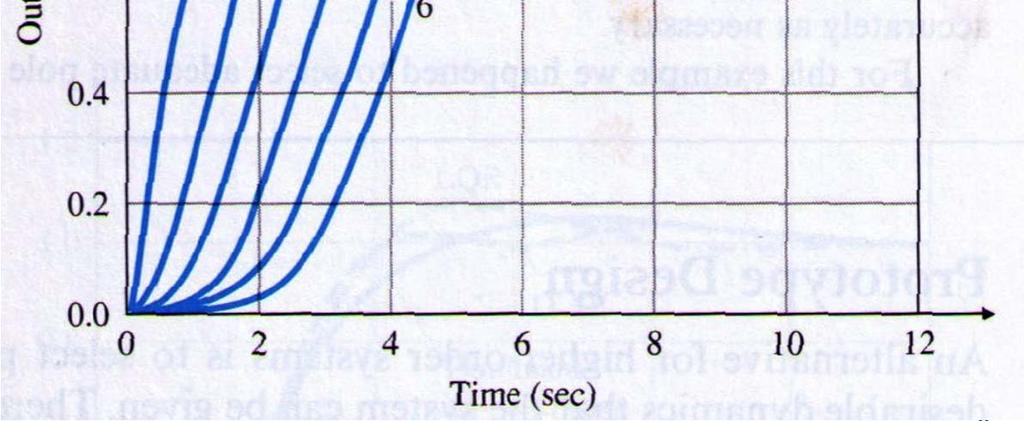
11 דוגמה תגובות { } σ = 1, R1= R = 1, ξ =.8, ω n = 1,, עבור 5 h 1 (t) אפסי המערכת אינם זזים ולכן: כשהקטבים זזים שמאלה האפס ב - הופך להיות דומיננטי 11
12 r f r - u - ( ) 1 si-a B C F x y משוב מצב - תכונות 1) במערכת קונטרולבילית ניתן למקם הקטבים בח"ס כרצוננו. במערכות SISO המשוב הוא יחיד. ב מערכות MIMO ישנם משובים רבים אשר מובילים לאותם קטבים (אבל לא לאותה מטריצה A) C לפי אקרמן המשוב פרופורציונלי ל 1- C. אם C קרובה לסינגולריות אזי 1- C "גדולה" ודרושים הגברים גדולים להזזת הקטבים. ( 3) משוב מצב אינו מזיז קטבים לא קונטרולביליים. ì qs הנח כי s 1 לא קונטרולבילי. אז 1 qaü q [ s1i A B ] ï = - = í ï ý ïî qb = ïþ ועם משוב מצב: qa c = q(a - BF) = qa = qs 1 A C ומכאן ש s 1 נותר קוטב של (המשוב לא מזיזו) 1
13 r u -1 x y ( si-a) B C f r F תכונות (המשך) 4) משוב מצב אינו משנה קונטרולבליות. כפל במטריצה לא סינגולרית אינו משנה הדרגה. é ù éi ù n si A+BF B [ si A B] ê - ú = - ê -Ac F I ú m êë úû ë û 5) משוב מצב אינו מזיז את אפסי המערכת. ) הסבר פשוט: מע' קונטרולבילית ניתן להציג במימוש מלווה. במימוש זה מקדמי פולינום האפסים הם אברי המטריצה c. מימוש מלווה עם משוב מצב מביא לחוג סגור שגם הוא במימוש מלווה עם אותה מטריצה c ומכאן שפולינומים האפסים זהה לזה שבחוג הפתוח). 13
14 משוב מצב ושגיאות מצב מתמיד משוב מצב הינו משוב סטטי הפועל על המצב ואינו משנה את סדר וסוג המערכת. לאינטגרטורים של התהליך אין כל השפעה על שגיאות מצב מתמיד וזאת בניגוד למשוב יציאה. ss t r: שגיאת מצב מתמיד למדרגה ב e = lim r(t) - y(t) = 1- T() = 1+ CA Bf ¹ f =- 1 r -1 CAc ו A C הפיכה היות ויציבה. B : f r -1 c על מנת לאפס השגיאה נבחר הגבר r ( A A-BF) c r f r - u - ( ) 1 si-a B C F x y 14
15 תוספת אינטגרטורים למשוב מצב אינטגרטורים במערכת אינם משפיעים על שגיאות מצב מתמיד עם משוב מצב (בניגוד למשוב יציאה ( על מנת לטפל בשגיאות מצב מתמיד מוסיפים אינטגרטורים על השגיאות כדלהלן: ( r ) x Î ò edt x = e = r- y = r-cx x n r x ונקבל: æ ö + נגדיר וקטור מצב מורחב: ç x çè ø Î æ A ö æbö æ ö x x u = r C + ç ç + çi è- ø èø è ø A ( ) B B r y= C x C אם המערכת המקורית קונטרולבילית (הצמד (A,B) קונטרולבילי) ואין לה גוזר (A,B) קונטרולבילית. ) בראשית) אזי גם המערכת המורחבת (הצמד 15
16 x x æ ö ç x çè ø Î n+ r ( ) תוספת אינטגרטורים למשוב מצב u(t) =- Fx(t) =- F F x(t) =-F x(t) -F ò x חוק הבקרה הוא: 1 1 e(t)dt זהו משוב מצב על המערכת המורחבת r e u x y F x AxBu C - - t F 1 ( ) u(s) =- Fx(s) =- F F x(s) =-F x(s) -F חוק הבקרה המותמר: e(s) s 16
17 תוספת אינטגרטורים למשוב מצב æx ö æa BF BF ö æ 1 ö x - - = x r x = ç ç C + çi è ø è - ø è ø -1 ( si A ) B r ( ) תמסורת החוג הסגור (תמסורת מ r ל y): הצבת u(t) במשואות המצב: -1 æsin A BF1 BF ö æ ö ç - + ç y(s) = C - r(s) = C r(s) ç C si çi è ø è ø r x r e 1 u -1 x y F ( si-a) B C s I r - - F 1 17
18 כניסת הפרעה æa BF BF ö æ 1 ö æbö x - - = x r d C + ç I + ç ç è - ø è ø è ø y): ל d החוג הסגור (תמסורת מ -1 æsin A BF BF ö æbö y(s) C ( si A ) B 1 d(s) ( C ) - + = - = d(s) ç C si ç è ø è ø d r = e x u x y F x= Ax+ B( u+ d) C - - F 1 r -1 18
19 תוספת אינטגרטורים -דוגמה. נתון דוגמה: דרוש משוב מצב + אינטגרטור על השגיאה כך ש p(s) = s + 5s+ 5 x = e= r-y P(s) = s+ 1 3 { x =- 3x + u.. המערכת המשולבת: ו מימוש P: æ 3 ö æö 1 æö y= x x - = x u r ç ç ç1 è- ø èø èø נמצא f) f = ( f1 לפי אקרמן: -1 æ 1 1 3ö - f ( 1)C p(a) ( 1) - = = (A 5A 5I ) ( 5) ç = - çè - ø 1 s+ 3 r e x u x = ò 5 y y/r 5 s 5s 5 = בדיקה 19
20 תוספת היזון קדימה ניתן גם להוסיף לחוק המשוב היזון קדימה מהרפרנס ראו ציור היזון קדימה מאפשר תוספת אפסים r e x F u x Ax Bu x C y - f - F 1 = - = -( 1 ) = ò חוק הבקרה: u f r Fx f r F F x f r Fx F edt והחוג הסגור: את F מחשבים כמקודם æa BF BF ö æbf ö x x = r ç C + ç I è - ø è ø æsin A BF BF ö æbf ö y(s) ( C ) = r(s) ç C si ç I è ø è ø r -1
21 תוספת היזון קדימה המשך דוגמה f המשך דוגמה: ופ"ת חוג סגור היא מתקבלת הסכימה 1 s+ 3 r e x u x = ò 5 y y/ r f s + 5 = + + s 5s 5 f קובע את מיקומו של האפס והשפעתו על התגובות עשויה להיות משמעותית. 1
22 ( משוב מצב פתרון בתדר ) SISO (SISO (במערכות f דרך נוספת למציאת -1 Δ (s) = (si- A), Δ (s) = (si- A+ bf ), Δ(s) = 1+ f (si-a) b Δ o c c o c -1 (s) = si- A + bf = (si- A)(I + (si-a) bf ) Δ Δ Δ Δ Δ -1-1 c = o I + (si- A) bf = o 1+ f (si- A) b = o Δ= Δ / Δ o c o -1 Adj(sI-A) Δ = 1+ f (si- A) b= 1+ f b= Δ Δ + f Adj(sI- A)b= t(s) f t(s) = Δ - Δ Δ c o Δ Δ c o נסמן:
23 משוב מצב שיקולי תכן מאמץ בקרה תלוי ישירות במרחק ההזזה של הקטבים ע"י המשוב אפסי חוג פתוח מושכים הקטבים ולכן קשה להזיז קטבים מאפסים קרובים לאי קונטרלביליות) (קרבה לכן מזיזים בד"כ אותם הקטבים שמביאים לשיפור תכונות החוג הפתוח. גישות נוספות: 1) זוג קטבים דומיננטיים. מזיזים הקטבים כך שמתקבל זוג דומיננטי ושאר הקטבים יותר מהירים ומרוסנים ) מיקום לפי אבי טיפוס. זאת על מנת לקבל תגובות ידועות. שני אבי טיפוס מקובלים: א) (Integral Time Absolute Error) ITAE פ תגובותיהם לשינוי מדרגה ממזערות את tedt ב) פילטרי בסל. "ת מסדרים שונים אשר ò 3
24 אבי טיפוס מיקום קטבים 4



25 אבי טיפוס תגובות מדרגה של אבי-טיפוס Bessel ITAE 5
26 משערכי מצב בד"כ לא ניתן למדוד את כל וקטור המצב או שהמדידות מייקרות משמעותית את המערכת. u המטרה לבנות אלמנט דינמי שישערך את משערך מצב או בקיצור משערך x מתוך מדידת y וידיעת u y xˆ 6
27 u x Ax Bu x C y משערך בחוג פתוח? x=ax+bu ˆ ˆ C ŷ 1) ננסה משערך המבוסס על מודל של התהליך: דינמיקת המשערך: התהליך: שגיאת שערוך: בהנחה ש A ו B ידועים במדויק וכך גם u(t) - חיסור של דינמיקת שגיאת השערוך: יציבה אזי השגיאה תקטן אקספוננציאלית ל, מ) דהיינו () מציג את. ˆx(t) x(t) xˆ 1) xˆ = Axˆ+ Bu, x() ˆ = xˆ ) x = Ax + Bu, x() = x 3) e x x, ˆ e() x xˆ - = - e= Ae A אם אבל, למשערך הנ"ל חסרונות מובהקים: אין לנו כל השפעה על דינמיקת השערוך. ויותר מכך אם A לא יציבה השערוך אינו מתכנס. 7
28 (Luenberger Observer משערך אסימפטוטי (משערך לונברגר המשערך מבוסס על מודל התהליך בתוספת משוב על השגיאה E yy שאותה ניתן למדוד E= y- yˆ = C(x- x) ˆ = Ce u x y x Ax Bu C xˆ Axˆ xˆ C ŷ המשערך : xˆ = Axˆ+ Bu + L(y- y) ˆ = ( A- LC) xˆ+ Bu+ Ly= Axˆ+ Bu+ LCe e ו L הגבר המשערך כאשר x-xˆ e = Ae-LCe = (A-LC) e e() x -xˆ דינמיקת שגיאת השערוך: עם תנאי התחלה: 8
29 u x Ax Bu x C y משערך אסימפטוטי (המשך) xˆ Axˆ xˆ C ŷ e = (A-LC)e ע"י בחירה מתאימה של L ניתן לשלוט על דינמיקת השגיאה שכן מסקנה (A-LC) משפט: באם הצמד (C,A) אובסרוובילי אזי ניתן למקם את קטבי כרצוננו. Φ ob (s) = (si - A + LC) נסמן : Δ ob (s) = det Φ (s) פולינום אופייני של המשערך: ob 9
30 ב חישוב הגבר המשערך :(SISO) l נוסחת אקרמן למציאת הגבר המשערך ( n = - + Î ) Δob(s) det(si A c); = Δob(A) O -1 éù 1 êë úû A -c הוכחה: באמצעות הדואליות לנוסחה עבור משוב מצב. במקום למצוא f הממקם השרשים של A-bf יש למצוא l למיקום שרשי או. A c- אי לכך מחליפים בנוסחת אקרמן ל f: AA ;bc ;f MATLAB מציאת L מבוצעת באותן פקודות כמו משוב מצב ( (1 3 (דואליות) : L= place(a,c,j) = acker(a,c,j)
31 חישוב הגבר המשערך -דוגמה הגבר המשערך: שקטביו ב -. y(s) דוגמה: בנו משערך ל P(s) = =1 s u(s) æ 1ö æö x = x u מימוש: + ç 1 è ø çè ø y= 1 x ( ) -1 ( ) ( c 4 = Δ ) ob A O é ù = A + 4A+ 4I æ ö é ù æ ö ê1ú ca = ç ê1ú ç 4 ë û è ø ë û è ø x æ ö æ ö æ ö ˆ = Axˆ+ bu + (y-y) ˆ xˆ = ˆx+ u+ E çè ø èç1 ø èç4ø E דינמיקת המשערך: 31
32 1 4 x æ ö æ ö æ ö ˆ = Axˆ+ bu + (y-y) ˆ xˆ = ˆx+ u+ E çè ø çè1ø çè4ø E x ˆ1= xˆ+ 4E ˆx = u+ 4E דוגמה דינמיקת המשערך: בפירוט:. u x x = x = u x 1 x 1 ò ò ˆx ˆx ˆx 1 ò ò x = y 1 = yˆ E
33 משערך אסמיפטוטי x(t) ˆ = (A- LC)x(t) ˆ + Bu(t) + Ly(t) מטריצת תמסורת משערך: התמרת לפלס של מביאה ל: ˆx(s) = Φ (Bu(s) + Ly(s)) = G (s)u(s) + G (s)y(s) Φ ob -1 ob (s) = (si - A + LC) u u Process y y Observer G u = Φ -1 ob B + G y = Φ -1 ob L xˆ x(t) z(t) C אזי התמסורת מ y ומ u ל ẑ הן: z(s) ˆ = C x(s) ˆ = C G (s)u(s) + C G (s)y(s) z z u z y z אם נגדיר אות 33
34 משערך אסמיפטוטי (SISO (מערכות l דרך נוספת למציאת Δ (s) = (si- A), Φ (s) = (si- A+ c), Δ(s) = 1+ c(si-a) o ob Δ ob ob ob t(s) (s) = o o Φ (1xn) ob (s) -1 o -1 si- A + c = (si- A)(I + (si-a) c) Δ = Δ I + (si- A) c = Δ Δ Δ= Δ / Δ Adj(sI-A) Δ Δ = 1+ c(si- A) = 1+ c = Δ Δ -1 ob cadj(si - A) (nx1) = Δob -Δ o o -1 o נסמן: 34
35 דוגמה מערכת שני המיכלים כאשר: q i h i R i σ ספיקות; הבקרה גבהי הנוזל התנגדות לזרימה שטח חתך המיכלים הגברי המשערך q 1 i 35
36 משערך -דוגמה מודל ליניארי עם מדידה של גובה הנוזל במיכל הראשון נתון ע"י: במטרה לשחזר את גובה הנוזל במיכל השני, h, בונים משערך: כאשר הגברי המשערך נתונים ע"י עבור (s) Δ ob רצוי. é 1 ù = ob(a) é ù R êë úû Δ êëσ 1úû 36
37 משערך -דוגמה Δob (s) = s + ξωns נקבל עבור + ωn 1 והגברי המשערך גדלים עם ω. n עבור = 1 R σ = 1, R = מתקבל: 1 37
 n 1 -דוגמה ns n Δ (s) = s + 1.")
38 משערך סימולציה: נניח ש והמשערך מתוכנן כך ש h ĥ( ω =1) שערוך h ( σ = R = R = 1) n 1 -דוגמה ns n Δ (s) = s ω + ω ob ĥ( ωn =6) 38
39 u d B x AxB C xˆ Axˆ x L xˆ y C n ŷ משערך והפרעות השפעת הפרעות כניסה ורעשי מדידה על השערוך עם הפרעת כניסה d(t) ורעשי מדידה n(t) מודל התהליך הוא - E = + + d(t) = x(t) Ax(t) B(u(t) ), x() x y(t) = Cx(t) + n(t), באם לא נוקטים בפעולה כנגד ההפרעות ורעש המדידה, המשערך ממשיך לפעול לפי x(t) ˆ = Ax(t) ˆ + Bu(t) + L(y(t) - Cx(t)), ˆ x() ˆ = xˆ ודינמיקת שגיאת השערוך תהיה: = ˆ e(t) (A LC)e(t) Bd(t) Ln(t), e()=x -x, nt וגם d t וגם נכללים בה! 39
 n בנוכחות ההפרעה השערוך אינו מתכנס ל h (t) השגיאה קטנה עם הגדלת הגברי")
40 דוגמה משערך והפרעת כניסה d(t)=.1 h (t) ו n(t)= שערוך בנוכחות עם d(t)=.1 ĥ( ω =1) n בנוכחות ההפרעה השערוך אינו מתכנס ל h (t) השגיאה קטנה עם הגדלת הגברי המשערך. ĥ( ω =6) n h 4
41 דוגמה משערך ורעש מדידה ו שערוך n(t)=.4sin(1t) בנוכחות h (t) n(t)=.4sin(1t) עם d(t)= h ĥ( ωn =1) בנוכחות רעשי מדידה השערוך אינו מתכנס ל h (t) השגיאה גדלה (!) הגברי המשערך. עם הגדלת ĥ( ωn =6) 41
42 שערוך הפרעות עבור התהליך יתכנו שני מקרים: = + + d(t) = x(t) Ax(t) B(u(t) ), x() x y(t) = Cx(t), e(t) e(t) = (A-LC)e(t) d(t) ידועה או ניתנת למדידה ואז ולכן.1 e(t) = -A) LC)e(t) + Bd(t) אינה ידועה או אינה ניתנת למדידה ואז d(t) ולכן e(t) לא ידעך לאפס...x(t) יחד עם d(t) ניתן להתגבר על הבעיה ולנסות לשערך את לצורך זה דרוש מודל דינמי של d(t) המבוסס על ידיעת אופי ההפרעה ולא על ערכיה המדויקים. המודל לכן הוא ללא כניסות ועם תנאי התחלה לא ידועים. מודלים כאלו נקראים מחוללי הפרעות. 4
43 מחוללי (גנרטורי) הפרעות d = d d d = d, x (t) A x (t), x () x d(t) = C x (t), d d מודל דינמי של הפרעה: C d ו כאשר A d ידועים ואי הודאות מתבטאת באי ידיעת תנאי ההתחלה. (A d וקטבי המודל (ערכים עצמיים של בדרך כלל המודל הנ"ל נקרא מחולל הפרעה יהיו על הציר המדומה.jω 43
44 x (t) = A x (t), x () = x -דוגמאוd d d d d, d(t) = C x (t), d d מחוללי הפרעות d d(t) = d1(t) D(s) = s x(t) = x(t), x() = d d d d d(t) = 1 x (t), d מדרגה ds + dr d(t) = (d+ dr t)1(t) D(s) = s ( 1) ( d x(t), x() ) dr x(t) = = d d d מדרגה + ריצה A ( ) d(t) = 1 x d(t), C d d 44
45 מחוללי הפרעות -דוגמאות אות הרמוני asin( φ)s+ aωcos( φ) d(t) = asin( ωt + φ) D(s) = s + ω ( ) ( sin( )) x(t) d = ω x(t), d x() d = φ cos( ) a - ω φ ( ) d(t) = 1 x d(t), C d A d כאשר ω ידועה ו a ו ᵩ אינם ידועים 45
46 צירוף התהליך ומחולל ההפרעה y ì ïx(t) = Ax(t) + B(u(t) + d(t)), x() = x í ï ïî y(t) = Cx(t), ì ï x d(t) = Adx d(t), x d() = xd, í ïî ï d(t) = Cdx d(t), x(t) η(t) x (t) ( A BC ) ( ) d B ( ) ì æ x ö (t) (t) u(t), () ï η = η + η = Ad çèx d, ø í ï ïî y(t) = ( C ) η(t), נצרף את מודל התהליך ואת מחולל ההפרעה באמצעות וקטור מצב מורחב η: ומכאן: הערות: 1) המודים של A d אינם קונטרולביליים באמצעות u אבל אובסרווביליים דרך ) למערכת המשולבת אין כניסות לא ידועות/לא מדודות (רק תנאי התחלה לא ידועים) ולכן ניתן לבנות עבורה משערך d 46
47 u B d n ζ x = Ax+ Bζ e(t) η(t) -ηˆ (t) : משערך למערכת המשולבת המשערך המשולב: משערך את ( x(t) η(t) ) x (t) ˆ æa BC ö d ˆ æbö æ L ö æ ˆx ö η(t) = (t) u(t) (y(t) ( C ) ˆ(t)), ˆ() ˆ ç A η ç d çl d çˆx è ø + è ø + è ø - η η = d, è ø = η A ˆ ò A x - B C ˆ C L y L ŷ _ דינמיקת שגיאת השערוך éæ A BC ö æ d L ö ù e(t) = ( C ) e(t), e() ˆ ç A - êè d ø çèl = η -η ë dø úû E C d והשגיאה דועכת אסימפטוטית לאפס אם מתקיימת דיטקטביליות 47
48 המשך דוגמה עם d(t)=.1 המערכת המשולבת נתונה ע"י והיא אובסרוובילית O deto נבנה משערך המשחזר גם את (t) h וגם את d(t) 48
49 n n Δ (s) = ( s +.5)( s ω s + ω ) ob המשך דוגמה נבחר את פולינום המשערך כ שערוך (t) h ו d(t) קבוע h ĥ ( ω =1) n ( σ = R = R = 1) 1 השערוך מתכנס ל (t) h ול d(t)=.1! ˆd ( ω =6) n ˆd ω ( n =1) ĥ ( ω =6) n 49
50 בקרת יציאה מבוססת משערך כשלא ניתן למדוד את כל וקטור המצב אלה רק את y, לא ניתן להשתמש במשוב מצב. אם מתקינים משערך מצב אסימפטוטי, וקטור המצב המשוערך מתכנס לאחר פרק זמן לוקטור המצב האמיתי. נראה מה קורה כאשר משוב המצב מבוסס על במקום על - ראו ציור d x ˆ = Ax ˆ + Bu+ L(y-y) ˆ u= f r-fxˆ n r המשערך : חוק הבקרה: r f r - u ζ B x x= Ax+ Bζ C xˆ Axˆ xˆ C ŷ y - E - הפרעות כניסה - רעשי מדידה d n F L xˆ 5
51 r f r u d ζ x x= Ax+ Bζ C n בקרה מבוססת משערך y - B xˆ Axˆ xˆ C ŷ - E משוואות המערכת בחוג סגור: æx ö æ A BF öæxö æbö æbö æ ö - ( fr ) r d = n ˆx LC A BF LC xˆ + B + + ç ç ç ç ç ç L è ø è - - øè ø è ø èø è ø æxö y= ( C ) ç ˆx çè ø C F A L xˆ B B B 1 3 u= f r-fxˆ r הבקרה: 51
52 החוג הסגור = æi ö -1 נבצע טרנספורמצית מצב באמצעות T ç I I çè - ø = æxö כדלהלן: המצב המקורי לוקטור ç e çè ø æx ö æ x ö æx ö çx = çx x ˆ = çe è ø è - ø è ø. באמצעותה יומר וקטור T T ˆ מטריצות המערכת לאחר הטרנספורמציה נתונות ע"י ,,3 1,,3 A = TAT ; B = TB ; C = CT ודינמיקת החוג הסגור עם וקטור המצב החדש: 5
53 החוג הסגור A = ודינמיקת החוג הסגור עם וקטור המצב החדש: æxö æa BF BF öæxö æbf ö æ r Bö æ ö - - e = A LC e + + B - ç ç ç ç ç ç è ø è - øè ø è è L ø ø è ø æ ö ç e çè ø ( ) C A x y= C + n B x e æ ö ç çè ø r d n עם תנאי ההתחלה: æa BF BF ö - - ומטריצת של החוג הסגור: èç A- LCø A B B
54 משפט ההפרדה הפולינום האופיני של החוג הסגור הוא: ומכאן Δ cl (s) = det(si- A) = det(si- A + BF) det(si- A + LC) SF Observer משפט ההפרדה: ניתן לתכן את משוב המצב והמשערך בנפרד ובאופן בלתי תלוי n קטבי החוג הסגור: n של משוב מצב ו n של המשערך. אם המשערך יציב ומשוב המצב יציב אזי החוג הסגור יציב. 54
55 y תמסורת מ r ל נמצא התמסורת מהרפרנס ליציאה עם d(t)=n(t)= æx ö æa BF BF öæxö æbf r ö - - r e = A LC e + ç ç ç ç è ø è - øè ø è ø y= ( C ) æxö ç e çè ø התמרת לפלס: -1 A BF BF ù - - Bfr é æi ö æ ö æ ö y(s) ( C ) s = r(s) I - A LC ê ç ç ç ë è ø è - øúû è ø -1 = C(sI -(A-BF) Bf r(s) r 55
56 הבקר הכולל פ"ת חוג סגור מ r ל y היא: r(s) y(s) = C(sI- A + BF) B בדיוק כמו משוב מצב ללא משערך! משמעות: קטבי המשערך אינם מעוררים ע"י r וגם לא כאשרx xˆ =. פרוש הדבר שקטבי המשערך אינם קונטרולביליים באמצעות הכניסה r. לעומת זאת קטבים אלו כן יעוררו ע"י d ופ"ת מ d ל y שונה מזו של משוב מצב טהור. -1 xˆ = Axˆ+ Bu+ L(y- Cx) ˆ + Ln u= f r-fxˆ r פ"ת הבקר: (si - A+ BF+ LC)x(s) ˆ = Bfrr(s) + Ly(s) + Ln(s) Φ(s) u(s) = f r(s) -Fx(s) ˆ r 56
57 פ הבקר הכולל "ת הבקר: ( 1 ) 1 Φ - r Φ - u(s) = I-F (s)b f r(s) - F (s)l (y(s) + n(s)) C r C y d r u y -1 (I-FΦ B)f r P(s) - C r FΦ -1 L n בקר שתי דרגות חופש! C y Φ(s) = (si- A+ BF+ LC) 57
58 הבקר הכולל : u ל y æa BF LC Lö -1 u(s) F (s)l y(s) - - =- Φ ç F çè ø התמסורת מ (I-F B) 1 1 Φ - - ob F 1 Φ - ob L פ"ת הבקר: ניתן להראות שאת התמסורות אפשר להביא לצורה אקויולנטית כאשר Φob(s) = (si- A+ LC) הערה: במימוש הבקר הכולל יש לבחון צמצומים! 58
59 -1 (I-FΦ B)f r שיקולי תכן FΦ -1 L שיקולים בבחירת קטבי המשערך. על קטבי המשערך להיות מהירים יותר מקטבי הבקר. זאת על מנת להבטיח ששגיאת השערוך תדעך מהר יחסית לדינמיקה המבוקרת. מקובל: קטבי משערך מהירים יותר מאלו של הבקר פי 6 הרי אין בעיה של מאמץ בקרה! מדוע לא יותר מפי -6? קטבים מהירים "מדי" יביאו ל הגדלת רוחב סרט המשערך הגברת רעשים והעברתם לבקר הגדלת רגישות לאי ודאויות תגובות ראשוניות "פרועות" 59
60 -1 (I-FΦ B)f r דוגמה FΦ -1 L 1 P(s) = s - 1 æ 1ö æö x = x u 1 + ç 1 è ø è ç ø y= 1 x ( ) התהליך: מימוש: f = ( 1.5 1) משוב מצב הממקם הקטבים ב j הוא: x æ.6ö - = ç.35 çè ø נבחן התגובה לתנאי התחלה 6
61 בקרה מבוססת משערך המשך דוגמה x(1) t(sec) æ ö 1 æ A BF ö = ç LC A-BF-LC - è ø 1 ç è ø משערך עם קטבים ב תגובת החוג הסגור עם משוב מצב והמשערך לתנאי התחלה: æö -æ.6ö x ˆ = x = ç è.35 ø çè ø Response to Initial Conditions - SF w and w/o Observer X 1 - SF + Observer C X 1 - Estimqted y X 1 - SF only = 6(s ) s + 3s+ 5.5 æö L = ç èø 3 x() j Response to Initial Conditions - SF w and w/o Observer X - SF + Observer X - Estimqted X - SF only t(sec) 61
62 בקרה מבוססת משערך המשך דוגמה x(1) Response to Initial Conditions - SF w and w/o Observer Estimated x 1 x 1 (SF only) L æ ö = ç è1 ø משערך עם קטבים ב 11- j תגובת החוג הסגור עם משוב מצב והמשערך לתנאי התחלה: æ-.6ö æö x ˆ = x = ç è.35 ø çè ø t(sec) x 1 (SF + Observer) é 1 ù æ A BF ö = ç èlc A-BF-LC ø 1 - ê ú ë û C y = 31(s ) s + 1s x() Response to Initial Conditions - SF w and w/o Observer x (SF + Observer) Estimated x x (SF only) t(sec) 6
63 בקרה מבוססת משערך המשך דוגמה CyP(j ω) Nyquist of SF and SF + Observers.1 PM DM SF SF+Sob SF+Fob Im) SF+slow Observer SF+fast Observer SF Re 63
64 בקרה מבוססת משערך המשך דוגמה CyP(j ω) 5 Bode of SF and SF + Observers Nyquist of SF and SF + Observers Magnitude(dB) Im) SF+slow Observer SF+fast Observer Phase(deg) SF (rad/s) Re 64
65 בקרה מבוססת משערך המשך דוגמה רעש מדידה.1 אפקט של רעש מדידה על משוב המצב ועל המשערך n "רעש לבן" בעל רוחב סרט מוגבל עם צפיפות הספק של אלפית שנ' d n וזמן קורלציה של r f r - u ζ B x x= Ax+ Bζ C xˆ Axˆ xˆ C ŷ y - E F L xˆ 65
66 בקרה מבוססת משערך המשך דוגמה רעש מדידה.8 With noise, L=[-;-3].8 x 1 Response to initial conditions with SF w/wo Observer, L=[-;-3].6 Estimated x 1 x 1 (SF + Observer x 1 (SF only).6 Estimated x 1 x 1 (SF + Observer x 1 (SF only) x 1 x Time, [sec] 1 With noise, L=[-;-3] Time, [sec] x Response to initial conditions with SF w/wo Observer, L=[-;-3].7.8 Estimated x x (SF + Observer x (SF only).6.5 Estimated x x (SF + Observer x (SF only) x x Time, [sec] Time, [sec] 66
67 בקרה מבוססת משערך המשך דוגמה רעש מדידה.6 With noise, L=[-;-1].6 No noise, L=[-;-1].4. Estimated x 1 x 1 (SF + Observer x 1 (SF only).4. Estimated x 1 x 1 (SF + Observer x 1 (SF only) x 1 -. x x Time, [sec] With noise, L=[-;-1] 4 Estimated x 3 x (SF + Observer x (SF only) Time, [sec] x Time, [sec] No noise, L=[-;-1] 1.5 Estimated x x (SF + Observer x (SF only) Time, [sec] 67
68 - בקרה מבוססת משערך המשך דוגמה רובסטיות No noise, L=[-;-3], with C=[1.5 ] Estimated x 1 x 1 (SF + Observer x 1 (SF only).8.6 x 1 Response to initial conditions with SF w/wo Observer, L=[-;-3] Estimated x 1 x 1 (SF + Observer x 1 (SF only).5.4 x 1 x Time, [sec] 1 No noise,l=[-;-3], with C=[1.5 ] C observer = (1.5 ) C = (1 ) process Time, [sec].7 x Response to initial conditions with SF w/wo Observer, L=[-;-3] Estimated x x (SF + Observer.6 Estimated x x (SF + Observer.5 x (SF only).5 x (SF only).4.3 x x C = (1.5 ) observer C = (1 ) process Time, [sec] Time, [sec] 68
69 - בקרה מבוססת משערך המשך דוגמה רובסטיות.6.4 No noise, L=[-;-1], with C=[1.5 ] Estimated x 1 x 1 (SF + Observer x 1 (SF only).6.4 No noise, L=[-;-1] Estimated x 1 x 1 (SF + Observer x 1 (SF only).. x 1 x C = (1.5 ) observer C = (1 ) process Time, [sec] No noise, L=[-;-1], with C=[1.5 ] Time, [sec] No noise, L=[-;-1] 1 1 Estimated x x (SF + Observer.5 Estimated x x (SF + Observer x (SF only) -.5 x (SF only) -1-1 x - x C observer = (1.5 ) C = (1 ) process Time, [sec] Time, [sec] 69
70 בקרה מבוססת משערך תוספת אינטגרטורים בקר מבוסס משערך עם פעולה אינטגרלית r e x F u d Process y n Observer xˆ F 1 משוב המצב מתוכנן לתהליך עם האנטגרטור( םי ( המשערך מחשב את מצב התהליך (ללא האינטגרטור) 7
71 מימוש בקרת מודל פנימי במרחב המצב x(t) = Ax(t) + B(u(t) + d(t)), x() = x y(t) = Cx(t), x (t) = A x (t), x () = x d d d d d, d(t) = C x (t), d d η(t) ( x(t) ) x (t) ( A BC ) ( ) d B æ x ö η (t) = η(t) + u(t), η() = Ad ç x d, çè ø A ( ) y(t) = C η(t), C B d התהליך : מחולל ההפרעה: נגדיר וקטור מצב מורחב η: התהליך + ההפרעה: 71
72 r f r מימוש בקרת מודל פנימי במרחב המצב _ u B d ζ x = Ax+ Bζ ˆ ò A x - C ˆ C L המשערך המשולב: ˆ ( A BC ) ( ) d ˆ B ( L ) ˆx ( ) ˆ ˆ æ ö η (t) = ˆ A η(t) + u(t) (y(t) C (t)), () d + L - η η = d ç ˆx = d, η çè ø A B ( A-LC BC ) ( ) d ˆ B ( L -LC ) d A η d Ld η ˆ(t) = (t) + u(t) + y(t) A B L L C n y ŷ _ E F 7
73 חוק הבקרה משוב מצב + מודל פנימי היות וקטבי מחולל ההפרעה אינם קונטרולביליים באמצעות u אזי הייצוב מתבצע ע"י משוב מצב על המצב המשוערך של התהליך ועל ההפרעה המשוערכת. מכאן שחוק הבקרה נתון ע"י: u= f r-fxˆ - dˆ = f r- F C ηˆ ( ) r r d F r f r _ u B d ζ x = Ax+ Bζ ˆ ò A x - L ˆ C C y ŷ n _ E F 73
74 בקרת מודל פנימי במרחב המצב נראה שאכן סכימת הבקרה הנ"ל היא משוב המצב המשוערך של התהליך והבקר כולל את מחולל ההפרעה (מודל פנימי). נציב את חוק הבקרה במשוואת השערוך ( A-LC BC ) ( ) d ˆ B ( L -LC ) d A η d Ld η ˆ(t) = (t) + u(t) + y(t) A B ˆ ( A-LC BC ) ( ) ( ) d ˆ æbf ˆ rr(t) B F C d (t) ö L η (t) = η(t) + - η + y(t) -LC d A d çè ø Ld A ( A-LC-BF ) ( Bf ) ( ) r L η = -LC A ˆ(t) + r(t) + L y(t) d d d L L ונקבל: 74
75 בקרת מודל פנימי במרחב המצב התמרת לפלס של משואת השערוך ( si- A + LC + BF ) ( Bf ) ( ) r L η = + LC d si-a ˆ(s) r(s) y(s) d Ld Ψ(s) ( Bf ) ( ) r L -1-1 ˆ(s) = (s) r(s) + (s) L y(s) d η Ψ Ψ הצבת וקטור המצב המשולב המשוערך בחוק הבקרה: æ ( ) ( ) ( ) ( ) -1 B ö -1 L u(s) = ç 1- F C d Ψ (s) frr(s) - F C d (s) L y(s) çè Ψ ø d u(s) ( ) ( ) -1 L =- F C d Ψ (s) y(s) L det Ψ(s) = det(si- A + LC + BF) det(si-a d ) d ומכאן שתמסורת הבקר בחוג הסגור: ופולינום המכנה של תמסורת הבקר: דהיינו: משוב מצב משוערך + מחולל ההפרעה. 75
76 (SISO) בקרה מבוססת משערך פתרון בתדר מהדיון הקודם התקבל המבנה: u r -1 P(s) = c(si- A) b= g(s)/d(s) y Φ- 1 ob b ˆx f Φ -1 ob Φ (s) = (si- A + c); Δ (s) = det Φ (s) ob ob ob n-1 = n-1 n-1 n = n-1 + g(s) g g s... g s d(s) d d s... d s s כאשר : 76
77 (SISO) בקרה מבוססת משערך פתרון בתדר r u y סכימה אקויולנטית: G = f b u 1 Φ - ob G y = f Φ -1 ob n (s) G (s) f b ; G (s) f u = -1 u -1 Φob y = Φob Δob(s) ob(s) + 1s n-1 n n-1s + s u β+ β1 + + βn-1 n-1 y γ+ γ1 + + γn-1 n-1 Δ δ δ δ n (s) s... s n (s) s... s n (s) Δ y ob (s) 77
78 (SISO) בקרה מבוססת משערך פתרון בתדר y(s) n y(s) Δob(s)g(s) g(s) g(s) Δob(s) = = r(s) d(s)( Δ (s) + n (s)) + g(s)n (s) Δ (s) Δ (s) Δ (s) ob u y c c ob Φ (s) (si- A+ f b); Δ (s) det Φ (s) c c c התמסורת: כאשר: הצד הימני של התמסורת בא מידיעה שהתמסורת מ r צמצום המשערך ל y היא כמו של משוב מצב אחרי מהשוואת שני המכנים שבתמסורת: * d(s)n u(s) + g(s)n y(s) = Δob(s)( Δc(s) -d(s)) n - n 1 n-1 - n 1 n n-1. n y הנ"ל משוואת דיופנטין כאשר נתונים ו וידועים g ו d והנעלמים הם: n u היות והתהליך מינימלי ו deg(d) deg(n ) < למשוואה פתרון יחידי. ו y 78
79 (SISO) בקרה מבוססת משערך פתרון בתדר 1 דוגמה: = P(s). s יש לבנות משוב מצב+משערך כשקטבי המשערך ב - וקטבי החוג הסגור ב 1-. c ob d(s) = s,g(s) = 1,n = Δ Δ (s) = (s+ 1) (s) = (s+ ) פתרון: n u(s) = β+ β1s n y(s) = γ+ γ1s הצבה ב ( ) מביאה: ( β + β ) + ( γ + γ ) = + ( + - ) 1 1 s s 1 s (s ) (s 1) s β = 9, β =, γ = 4, γ =
80 פתרון בתדר דוגמה r _ u d s + 9 (s+ ) P(s) = 1/s + 1s + 4 (s+ ) y y/r= 1/(s+ 1) דוגמה s + 6s+ 13 y/d= (s + 1) (s + ) (s+ ) s + 6s+ 13 1s+ 4 (s+ ) 1/s סכימות אקויולנטיות שני מודים חבויים ב -=s 8
81 פתרון בתדר דוגמה r (s+ ) u y s + 6s+ 13 d 1/s s=-3±j סכימות אקויולנטיות שני מודים חבויים ב 1s+ 4 s + 6s+ 13 הערה: אפשר לנסות לקבל את אותו y/r עם בקר C בחוג הקדמי אבל אז מתקבל: s C(s) = s + והחוג אינו יציב עקב המוד החבוי ב =s 81
82 משערך מסדר מופחת למערכת עם n משתני מצב ו r מדידות (יציאות) אין צורך לשערך את כל המצב שכן ידועות r קומבינציות ליניאריות של משתני המצב ycx) ( לכן ניתן להשתמש במשערך מסדר מופחת: מסדר n-r.ועבור SISO הסדר ל 1-n. ניתן להפחית é êdeg n,deg n ù ú n-1 ë û ( u) ( y) c ob d(s) = s,g(s) = 1,n = Δ Δ (s) = (s+ 1) (s) = (s+ ) ( ) דרך הפתרון כמיקודם אלא ש 1- n deg Δ = ולכן ob n (s) = β u n (s) = γ + γ y 1 ( β ) + ( γ + γ ) = + ( + - ) 1 s 1 s (s ) (s 1) s n (s) = ; n (s) = 5s+ u y s המשך דוגמה: הצבה ב ( ) מביאה: 8
83 משערך מסדר מופחת s+ 1/s 5s+ s+ המשך דוגמה: והתמסורות y/r= 1/(s+ 1) s+ 4 y/d= (s + 1) (s + ) s+ s+ 4 1/s סכימה שקולה: 5s+ s+ הערות: 1) אין משתמשים במשערך מסדר מופחת כשרעשי המדידה משמעותיים ) פיתוח משערך מסדר מופחת באופן כללי במרחב המצב נמצא בספרות. 83
84 טיפול באילוצי כניסה בבקרה מבוססת משערך על u בקרת מצב מבוססת משערך מאפשרת לכלול אילוצים (כמו רוויות למשל) כניסות באופן פשוט. על מנת למנוע "התנפחויות" על הבקרה לקיים התנאים : 1) על מצב הבקר להיות מונע ע"י הכניסה האמיתית ) על הבקר להיות יציב בעת שמונע ע"י הכניסה המוגבלת האמיתית התנאים הללו מקוימים באופן טבעי במשוב מצב מבוסס משערך יציב. y ˆx הערה: על המשערך לכלול שיערוך ההפרעה. 84
Untitled
 2 אגודת הסטודנטים, בן-גוריון 3 פתרון מבחן מועד ב', חדו"א 2 להנדסת חשמל, סמסטר ב', תשע"ו שאלה : א הטור המגדיר את fx הוא טור טלסקופי. הסכומים החלקיים של טור זה הם S n x n k kxe kx k xe k x nxe nx x fx lim
2 אגודת הסטודנטים, בן-גוריון 3 פתרון מבחן מועד ב', חדו"א 2 להנדסת חשמל, סמסטר ב', תשע"ו שאלה : א הטור המגדיר את fx הוא טור טלסקופי. הסכומים החלקיים של טור זה הם S n x n k kxe kx k xe k x nxe nx x fx lim
משוואות דיפרנציאליות מסדר ראשון
 אינטגרל מסוים i שאינו תלוי בחלוקה ] [ ובחירה m. S f סכום אינטגרלי + f + K i lim S כאשר i 0. I f I הגדרה אם קיים נקרא אינטגרל מסוים ומסומן הצבה.[ רציפות ב- ] אז הוא f g g g כאשר f g g כאשר udv uv vdu g
אינטגרל מסוים i שאינו תלוי בחלוקה ] [ ובחירה m. S f סכום אינטגרלי + f + K i lim S כאשר i 0. I f I הגדרה אם קיים נקרא אינטגרל מסוים ומסומן הצבה.[ רציפות ב- ] אז הוא f g g g כאשר f g g כאשר udv uv vdu g
<4D F736F F D20EEF9E5E5E0E5FA20E3E9F4F8F0F6E9E0ECE9E5FA2E646F63>
 משוואות דיפרנציאליות מושגי ייסוד: משוואה המקשרת את גורם הפונקציה עם הפונקציה והנגזרות שלה או הדיפרנציאלים שלה, נקראת "משוואה דיפרנציאלית רגילה" לפתור משוואה דיפרנציאלית פירושו, למצוא את הפונקציה המקיימת
משוואות דיפרנציאליות מושגי ייסוד: משוואה המקשרת את גורם הפונקציה עם הפונקציה והנגזרות שלה או הדיפרנציאלים שלה, נקראת "משוואה דיפרנציאלית רגילה" לפתור משוואה דיפרנציאלית פירושו, למצוא את הפונקציה המקיימת
Microsoft Word - Sol_Moedb10-1-2,4
 הפקולטה למתמטיקה - הטכניון חיפה מד''ח - 48 חורף תשע''א - בחינה סופית מועד ב' שאלה : תהי נתונה המד"ח הבאה: u + uu = y א. מצא את העקומים האופייניים של משוואה זו בצורה פרמטרית. ב. פתור את המד"ח הנתונה לעיל
הפקולטה למתמטיקה - הטכניון חיפה מד''ח - 48 חורף תשע''א - בחינה סופית מועד ב' שאלה : תהי נתונה המד"ח הבאה: u + uu = y א. מצא את העקומים האופייניים של משוואה זו בצורה פרמטרית. ב. פתור את המד"ח הנתונה לעיל
MathType Commands 6 for Word
 0 אלגברה לינארית גיא סלומון סטודנטים יקרים ספר תרגילים זה הינו פרי שנות ניסיון רבות של המחבר בהוראת מתמטיקה באוניברסיטת תל אביב, באוניברסיטה הפתוחה, במכללת שנקר ועוד שאלות תלמידים וטעויות נפוצות וחוזרות
0 אלגברה לינארית גיא סלומון סטודנטים יקרים ספר תרגילים זה הינו פרי שנות ניסיון רבות של המחבר בהוראת מתמטיקה באוניברסיטת תל אביב, באוניברסיטה הפתוחה, במכללת שנקר ועוד שאלות תלמידים וטעויות נפוצות וחוזרות
! 1! משוואות מסדר ראשו! (הפרדת משתני*, הומוגנית, לינארית) xyy = 1 x y xy 2 = 2xy 2 מצא את הפתרו' הכללי: x y y = 3 א) y ג) ב) ד) y tan x = y (1 ( x+ y
 xyy = 1 x y xy 2 = 2xy 2 מצא את הפתרו' הכללי: x y y = 3 א) y ג) ב) ד) y tan x = y (1 ( x+ y") !! משוואות מסדר ראשו! (הפרדת משתני*, הומוגנית, לינארית) tan ( a a z 0 a z s ds dt (רמז: cos d d ז) d ( ) d ( ) ח) ) מצא את הפתרונות המקיימי :. () 0 ( ). (). () 0 d ( ) d ( ) π. sin ln ) tan cos d cos d
!! משוואות מסדר ראשו! (הפרדת משתני*, הומוגנית, לינארית) tan ( a a z 0 a z s ds dt (רמז: cos d d ז) d ( ) d ( ) ח) ) מצא את הפתרונות המקיימי :. () 0 ( ). (). () 0 d ( ) d ( ) π. sin ln ) tan cos d cos d
. שאלה 1: ה אי x] T : R 4[ x] R 4[ אופרטור ליניארי מוגדר על-ידי T( ax bx cx d) bx ax cx c )13 נק'( א( מצאו את הערכים העצמיים, המרחבים העצמיים
![. שאלה 1: ה אי x] T : R 4[ x] R 4[ אופרטור ליניארי מוגדר על-ידי T( ax bx cx d) bx ax cx c )13 נק'( א( מצאו את הערכים העצמיים, המרחבים העצמיים](/thumbs/101/149739786.jpg ". שאלה 1: ה אי x] T : R 4[ x] R 4[ אופרטור ליניארי מוגדר על-ידי T( ax bx cx d) bx ax cx c )13 נק'( א( מצאו את הערכים העצמיים, המרחבים העצמיים") שאלה : ה אי x] : R4[ x] R4[ אופרטור ליניארי מוגדר על-ידי ( ax bx cx d) bx ax cx c )3 נק'( א( מצאו את הערכים העצמיים המרחבים העצמיים והפולינום המורכב מוקטורים עצמיים של R [ [x האופייני של מצאו בסיס של 4
שאלה : ה אי x] : R4[ x] R4[ אופרטור ליניארי מוגדר על-ידי ( ax bx cx d) bx ax cx c )3 נק'( א( מצאו את הערכים העצמיים המרחבים העצמיים והפולינום המורכב מוקטורים עצמיים של R [ [x האופייני של מצאו בסיס של 4
גמר לבתי ספר לטכנאים ולהנדסאים סוג הבחינה: מדינת ישראל אביב תשע"א, 2011 מועד הבחינה: משרד החינוך סמל השאלון: נספחים: א. נספח לשאלה 2 ההנחיות בש
 גמר לבתי ספר לטכנאים ולהנדסאים סוג הבחינה: מדינת ישראל אביב תשע"א, מועד הבחינה: משרד החינוך 793 סמל השאלון: נספחים: א. נספח לשאלה ההנחיות בשאלון זה מנוסחות בלשון זכר, אך מכוונות לנבחנות ולנבחנים כאחד.
גמר לבתי ספר לטכנאים ולהנדסאים סוג הבחינה: מדינת ישראל אביב תשע"א, מועד הבחינה: משרד החינוך 793 סמל השאלון: נספחים: א. נספח לשאלה ההנחיות בשאלון זה מנוסחות בלשון זכר, אך מכוונות לנבחנות ולנבחנים כאחד.
תאריך הבחינה 30
 אוניברסיטת בן-גוריון בנגב מדור בחינות 9//8 תאריך הבחינה : ד"ר ס. סמית, דר' דבורה שמות המורים : פרץ, פרופ' גריגורי דרפל מבחן ב: חדו"א ג' --9 מס' הקורס: מיועד לתלמידי: ביולוגיה, כימיה וגאולוגיה ב מועד: א
אוניברסיטת בן-גוריון בנגב מדור בחינות 9//8 תאריך הבחינה : ד"ר ס. סמית, דר' דבורה שמות המורים : פרץ, פרופ' גריגורי דרפל מבחן ב: חדו"א ג' --9 מס' הקורס: מיועד לתלמידי: ביולוגיה, כימיה וגאולוגיה ב מועד: א
מקביליות
 תכונות שמורה Invariant Properties גרא וייס המחלקה למדעי המחשב אוניברסיטת בן-גוריון 2 בדיקות מודל Checking( )Model מערכת דרישות מידול פירמול בדיקות מודל )Model Checking( מודל של המערכת תכונות פורמליות סימולציה
תכונות שמורה Invariant Properties גרא וייס המחלקה למדעי המחשב אוניברסיטת בן-גוריון 2 בדיקות מודל Checking( )Model מערכת דרישות מידול פירמול בדיקות מודל )Model Checking( מודל של המערכת תכונות פורמליות סימולציה
תוצאות סופיות מבחן אלק' פיקוד ובקרה קיץ 2014
 תוצאות סופיות למערכות אלק' פיקוד ובקרה להנדסאים וטכנאים מועד קיץ תשע"ד 7/2014 פותר המבחן: מתי דוד למרות מאמצי לפתור נכון, יתכן ונפלו טעויות בפתרון, אשמח לקבל הערותיכם בדוא"ל : @hotmail.com ההצלחה שלי היא
תוצאות סופיות למערכות אלק' פיקוד ובקרה להנדסאים וטכנאים מועד קיץ תשע"ד 7/2014 פותר המבחן: מתי דוד למרות מאמצי לפתור נכון, יתכן ונפלו טעויות בפתרון, אשמח לקבל הערותיכם בדוא"ל : @hotmail.com ההצלחה שלי היא
תרגיל 9 מבוא ללוגיקה ותורת הקבוצות, סתיו תשע"ד 1. תהי L השפה בעלת סימן פונקצייה דו מקומי G, סימן פונקציה חד מקומי T, סימן יחס תלת מקומי.c, d וקבועים L
 תרגיל 9 מבוא ללוגיקה ותורת הקבוצות, סתיו תשע"ד 1. תהי L השפה בעלת סימן פונקצייה דו מקומי G, סימן פונקציה חד מקומי T, סימן יחס תלת מקומי.c, d וקבועים L, K סימני יחס חד מקומיים,R לכל אחד מהביטויים הבאים,
תרגיל 9 מבוא ללוגיקה ותורת הקבוצות, סתיו תשע"ד 1. תהי L השפה בעלת סימן פונקצייה דו מקומי G, סימן פונקציה חד מקומי T, סימן יחס תלת מקומי.c, d וקבועים L, K סימני יחס חד מקומיים,R לכל אחד מהביטויים הבאים,
Microsoft Word - madar1.docx
 משוואות דיפרנציאליות רגילות גיא סלומון סטודנטים יקרים ספר תרגילים זה הינו פרי שנות ניסיון רבות של המחבר בהוראת מתמטיקה באוניברסיטת תל אביב, באוניברסיטה הפתוחה, במכללת שנקר ועוד. שאלות תלמידים וטעויות נפוצות
משוואות דיפרנציאליות רגילות גיא סלומון סטודנטים יקרים ספר תרגילים זה הינו פרי שנות ניסיון רבות של המחבר בהוראת מתמטיקה באוניברסיטת תל אביב, באוניברסיטה הפתוחה, במכללת שנקר ועוד. שאלות תלמידים וטעויות נפוצות
בגרות עז יולי 17 מועד קיץ ב שאלון ,000 א. ניתוח הנתונים מחירה של ספה הוא שקלים, והיא התייקרה ב-. 25% כאשר המחיר מתייקר ב- המחיר החדש הוא פי,
 ,000 א ניתוח הנתונים מחירה של ספה הוא שקלים, והיא התייקרה ב- 5% כאשר המחיר מתייקר ב- המחיר החדש הוא פי, 5% לכן, המחיר החדש הוא: 5,000 00 5 5 00 שקלים ממחירו הקודם 0005 תשובה: מחיר הספה לאחר ההתייקרות הוא
,000 א ניתוח הנתונים מחירה של ספה הוא שקלים, והיא התייקרה ב- 5% כאשר המחיר מתייקר ב- המחיר החדש הוא פי, 5% לכן, המחיר החדש הוא: 5,000 00 5 5 00 שקלים ממחירו הקודם 0005 תשובה: מחיר הספה לאחר ההתייקרות הוא
Microsoft Word - 38
 08.05.6-80 - פתרון מבחן מס' 8 (ספר מבחנים שאלון 0580) t (v 75) (א) מהירות ההתקרבות של שני הרוכבים היא לכן הזמן שעבר מיציאת הרוכבים ועד הפגישה: קמ"ש, שעות 60 v 75 לפי הנתון בשאלה, נרכיב את המשוואות: 60
08.05.6-80 - פתרון מבחן מס' 8 (ספר מבחנים שאלון 0580) t (v 75) (א) מהירות ההתקרבות של שני הרוכבים היא לכן הזמן שעבר מיציאת הרוכבים ועד הפגישה: קמ"ש, שעות 60 v 75 לפי הנתון בשאלה, נרכיב את המשוואות: 60
מדינת ישראל סוג הבחינה: בגרות לבתי ספר על יסודיים משרד החינוך מועד הבחינה: קיץ תשע"ג, 2013 נספח לשאלון: אין להעביר את הנוסחאון לנבחן אחר נוסחאו
 מדינת ישראל סוג הבחינה: בגרות לבתי ספר על יסודיים משרד החינוך מועד הבחינה: קיץ תשע"ג, 01 נספח לשאלון: 8801 אין להעביר את הנוסחאון לנבחן אחר )1 עמודים( הגדלים בנוסחאון מופיעים ביחידות SI 1 1 [ N m] kgf
מדינת ישראל סוג הבחינה: בגרות לבתי ספר על יסודיים משרד החינוך מועד הבחינה: קיץ תשע"ג, 01 נספח לשאלון: 8801 אין להעביר את הנוסחאון לנבחן אחר )1 עמודים( הגדלים בנוסחאון מופיעים ביחידות SI 1 1 [ N m] kgf
תרגול מס' 7 – חזרה על MST ואלגוריתם Dijkstra
 תרגול מס' 10 תכנון ליניארי תכנון לינארי הינו כלי שימושי במדעי המחשב. בקורס ראינו כיצד ניתן להציג בעיות שונות במסגרת תכנון לינארי. בנוסף, ראינו שימושים לדואליות של תוכניות לינאריות, אשר מקשרת בין בעיות
תרגול מס' 10 תכנון ליניארי תכנון לינארי הינו כלי שימושי במדעי המחשב. בקורס ראינו כיצד ניתן להציג בעיות שונות במסגרת תכנון לינארי. בנוסף, ראינו שימושים לדואליות של תוכניות לינאריות, אשר מקשרת בין בעיות
áñéñ åîéîã (ñéåí)
") מתו% 5 בסיס ומימד סיום) במסגרת הוכחת משפט של בסיסי לכל שני בסיסי של אותו מ"ו יש אותו מספר איברי ), הוכחנו בעצ יותר: משפט: א V מ"ו נוצר סופית, A V קבוצה בת"ל, B V קבוצה פורשת אז. A B הערה: מרחב וקטורי הוא
מתו% 5 בסיס ומימד סיום) במסגרת הוכחת משפט של בסיסי לכל שני בסיסי של אותו מ"ו יש אותו מספר איברי ), הוכחנו בעצ יותר: משפט: א V מ"ו נוצר סופית, A V קבוצה בת"ל, B V קבוצה פורשת אז. A B הערה: מרחב וקטורי הוא
אנליזה מתקדמת
 א) א) ג) -- אוניברסיטת בן- מדור בחינות מס' גוריון בנגב תאריך הבחינה: 7/0/00 שם המרצים: פונף, בסר, טקצ'נקו, ליידרמן חדו"א א בחינה ב: 0--00 מס' הקורס: מתמטיקה,מדעי המחשב, הנדסת תכנה מיועד לתלמידי: א' מועד:
א) א) ג) -- אוניברסיטת בן- מדור בחינות מס' גוריון בנגב תאריך הבחינה: 7/0/00 שם המרצים: פונף, בסר, טקצ'נקו, ליידרמן חדו"א א בחינה ב: 0--00 מס' הקורס: מתמטיקה,מדעי המחשב, הנדסת תכנה מיועד לתלמידי: א' מועד:
. [1,3] ו = 0 f(3) f(1) = עמוד 1 מתוך 6 דר' ז. אולחא מס' הקורס 9711 חדו''א הנ מכונות 1 f ( x) = ( x 1)( x 2)( x 3) c= f c = c (1,3), c תשובות I 1) פונ
![. [1,3] ו = 0 f(3) f(1) = עמוד 1 מתוך 6 דר' ז. אולחא מס' הקורס 9711 חדו''א הנ מכונות 1 f ( x) = ( x 1)( x 2)( x 3) c= f c = c (1,3), c תשובות I 1) פונ](/thumbs/100/145765931.jpg ". [1,3] ו = 0 f(3) f(1) = עמוד 1 מתוך 6 דר' ז. אולחא מס' הקורס 9711 חדו''א הנ מכונות 1 f ( x) = ( x 1)( x 2)( x 3) c= f c = c (1,3), c תשובות I 1) פונ") . [,] ו 0 f() f() עמוד מתוך 6 ז. אולחא מס' הקורס 97 חדו''א הנ מכונות f ( ) ( )( )( ) f (,), תשובות I ) פונ' לכן קיים פתרון רציפה וגזירה בקטע כך ש 0 ) (? f ( ) +, ± ± 0.58 (, ),.58,.4 יש n פעמים להשתמש
. [,] ו 0 f() f() עמוד מתוך 6 ז. אולחא מס' הקורס 97 חדו''א הנ מכונות f ( ) ( )( )( ) f (,), תשובות I ) פונ' לכן קיים פתרון רציפה וגזירה בקטע כך ש 0 ) (? f ( ) +, ± ± 0.58 (, ),.58,.4 יש n פעמים להשתמש
2019 שאלות מומלצות לתרגול מס' דיפרנציאביליות של פונקציה סקלרית )המשך(. כלל השרשרת. S = ( x, y, z) z = x + 3y על המשטח מצאו נקודה בה מישור משיק
המשך(. כלל השרשרת. S = ( x, y, z) z = x + 3y על המשטח מצאו נקודה בה מישור משיק") דיפרנציאביליות של פונקציה סקלרית )המשך( כלל השרשרת S ( z) z + על המשטח מצאו נקודה בה מישור משיק מקביל : f ( ) + הפונקציה מוגדרת וגזירה ברציפות בכל M( ) שאלה נתון פרבולואיד אליפטי P ( z) + 6 + z + 8 למישור
דיפרנציאביליות של פונקציה סקלרית )המשך( כלל השרשרת S ( z) z + על המשטח מצאו נקודה בה מישור משיק מקביל : f ( ) + הפונקציה מוגדרת וגזירה ברציפות בכל M( ) שאלה נתון פרבולואיד אליפטי P ( z) + 6 + z + 8 למישור
מטלת מנחה (ממ"ן) 11 הקורס: חשבון אינפיניטסימלי II חומר הלימוד למטלה: יחידות 2,1 4 מספר השאלות: 7 משקל המטלה: נקודות סמסטר: ב 2007 מו
 11 הקורס: חשבון אינפיניטסימלי II חומר הלימוד למטלה: יחידות 2,1 4 מספר השאלות: 7 משקל המטלה: נקודות סמסטר: ב 2007 מו") מטלת מנחה (ממ"ן) הקורס: - חשבון אינפיניטסימלי II חומר הלימוד למטלה: יחידות, 4 מספר השאלות: 7 משקל המטלה: נקודות 337 סמסטר: ב 7 מועד אחרון להגשה: אנא שים לב: מלא בדייקנות את הטופס המלווה לממ"ן בהתאם לדוגמה
מטלת מנחה (ממ"ן) הקורס: - חשבון אינפיניטסימלי II חומר הלימוד למטלה: יחידות, 4 מספר השאלות: 7 משקל המטלה: נקודות 337 סמסטר: ב 7 מועד אחרון להגשה: אנא שים לב: מלא בדייקנות את הטופס המלווה לממ"ן בהתאם לדוגמה
מקומות גיאומטריים השתלמות קיץ הקדמה: נושא המקומות הגיאומטריים הינו מרכזי בתכנית הלימוד ל- 5 יח"ל. פרק זה מאגד בתוכו את כל המרכיבים של הגיאומטרי
 מקומות גיאומטריים השתלמות קיץ - 015 הקדמה: נושא המקומות הגיאומטריים הינו מרכזי בתכנית הלימוד ל- 5 יח"ל פרק זה מאגד בתוכו את כל המרכיבים של הגיאומטריה האנליטית: ישר, מעגל, אליפסה ופרבולה בראיה מוכללת נושא
מקומות גיאומטריים השתלמות קיץ - 015 הקדמה: נושא המקומות הגיאומטריים הינו מרכזי בתכנית הלימוד ל- 5 יח"ל פרק זה מאגד בתוכו את כל המרכיבים של הגיאומטריה האנליטית: ישר, מעגל, אליפסה ופרבולה בראיה מוכללת נושא
אלגברה ליניארית תאוריה ותרגילים פרופ' שלמה הבלין, אוניברסיטת בר אילן ד"ר יפית מעין, מרכז אקדמי לב
 אלגברה ליניארית תאוריה ותרגילים פרופ' שלמה הבלין, אוניברסיטת בר אילן ד"ר יפית מעין, מרכז אקדמי לב 1 א. תכונות וקטורים תוכן עניינים 1 1 1 2 2 2 3 3 4 4 5 5 5 6 7 8 9 9 10 10 11 11 12 12 וקטור שוויון וקטורים
אלגברה ליניארית תאוריה ותרגילים פרופ' שלמה הבלין, אוניברסיטת בר אילן ד"ר יפית מעין, מרכז אקדמי לב 1 א. תכונות וקטורים תוכן עניינים 1 1 1 2 2 2 3 3 4 4 5 5 5 6 7 8 9 9 10 10 11 11 12 12 וקטור שוויון וקטורים
Microsoft Word ACDC à'.doc
 דו"ח מסכם בניסוי: AC/DC חלק: א' סמסטר ב' תשס"א שם הבודק : תאריך הבדיקה: I שם מדריך הניסוי (שם מלא): סרגיי ציון הדו"ח: II תאריך ביצוע הניסוי: 14/05/001 תאריך הגשת הדו"ח: 1/05/001 הדו"ח מוגש על ידי: II I
דו"ח מסכם בניסוי: AC/DC חלק: א' סמסטר ב' תשס"א שם הבודק : תאריך הבדיקה: I שם מדריך הניסוי (שם מלא): סרגיי ציון הדו"ח: II תאריך ביצוע הניסוי: 14/05/001 תאריך הגשת הדו"ח: 1/05/001 הדו"ח מוגש על ידי: II I
ע 003 מרץ 10 מועד מיוחד פתרונות עפר
 בגרות ע מרץ 0 מועד מיוחד שאלון 5005. x א. () יש למצוא את הערך של m שעבורו גרף + ) mx f ( x) mm ( 6) x + ( כאשר נציב m או 6 m נקבל 0 0 ונקבל פונקציה עולה ובהתאם הישר לא מקביל לציר ה - הוא ישר המקביל לציר
בגרות ע מרץ 0 מועד מיוחד שאלון 5005. x א. () יש למצוא את הערך של m שעבורו גרף + ) mx f ( x) mm ( 6) x + ( כאשר נציב m או 6 m נקבל 0 0 ונקבל פונקציה עולה ובהתאם הישר לא מקביל לציר ה - הוא ישר המקביל לציר
סיכום אינפי 2 28 ביולי 2010 מרצה: צביק איתמר, בעזרת סיכומים משיעוריו של נועם ברגר מתרגלים: ינאי ג', איב גודין אין המרצה או המתרגלים קשורים לסיכום זה ב
 סיכום אינפי 2 28 ביולי 200 מרצה: צביק איתמר, בעזרת סיכומים משיעוריו של נועם ברגר מתרגלים: ינאי ג', איב גודין אין המרצה או המתרגלים קשורים לסיכום זה בשום דרך..אינני לוקחת אחריות על מה שכתוב מטה. השימוש
סיכום אינפי 2 28 ביולי 200 מרצה: צביק איתמר, בעזרת סיכומים משיעוריו של נועם ברגר מתרגלים: ינאי ג', איב גודין אין המרצה או המתרגלים קשורים לסיכום זה בשום דרך..אינני לוקחת אחריות על מה שכתוב מטה. השימוש
מבחן חוזר במכניקה 55 א יא יח""ללח פתור 3 מהשאלות 1-5 לכל שאלה 33%. חומר עזר מותר מחשבון ונוסחאון של בגרות. v m sec משך הבחינה 105 דקות. שאלה מספר 1 4
 מבחן חוזר במכניקה 55 א יא יח""ללח פתור 3 מהשאלות 1-5 לכל שאלה 33%. חומר עזר מותר מחשבון ונוסחאון של בגרות. v sec משך הבחינה 105 דקות. שאלה מספר 1 4 גוף נע לאורך ציר X כך שברגע. x הוא נמצא 0 t 0-10 16 19
מבחן חוזר במכניקה 55 א יא יח""ללח פתור 3 מהשאלות 1-5 לכל שאלה 33%. חומר עזר מותר מחשבון ונוסחאון של בגרות. v sec משך הבחינה 105 דקות. שאלה מספר 1 4 גוף נע לאורך ציר X כך שברגע. x הוא נמצא 0 t 0-10 16 19
Microsoft Word - hedva 806-pitronot-2011.doc
 ו- ( ( השייכים לתחום ההגדרה שאלה פתרון: א. לפי ההגדרה, f היא פונקציה זוגית, אם לכל ( ) שלה, מתקיים. f f נציב את במקום בפונקציה הנתונה ונקבל: ( ) ( ) ( ) + + + + ( ) f f f כלומר, הפונקציה היא זוגית. על
ו- ( ( השייכים לתחום ההגדרה שאלה פתרון: א. לפי ההגדרה, f היא פונקציה זוגית, אם לכל ( ) שלה, מתקיים. f f נציב את במקום בפונקציה הנתונה ונקבל: ( ) ( ) ( ) + + + + ( ) f f f כלומר, הפונקציה היא זוגית. על
דף נגזרות ואינטגרלים לשאלון 608 כללים למציאת נגזרת של פונקציה: n 1. y' n x n, y הנגזרת x.1 נכפול בחזקה )נרשום אותה משמאל ל- (. x א. נחסר אחד מהחזקה. ב
נרשום אותה משמאל ל- (. x א. נחסר אחד מהחזקה. ב") דף נגזרות ואינטגרלים לשאלון 608 כללים למציאת נגזרת של פונקציה: n n n, y הנגזרת נכפול בחזקה )נרשום אותה משמאל ל- ( א נחסר אחד מהחזקה ב 7 y כאשר גוזרים כופלים בחזקה, 7 כלומר נרשום אותה משמאל ל-, ובחזקה של
דף נגזרות ואינטגרלים לשאלון 608 כללים למציאת נגזרת של פונקציה: n n n, y הנגזרת נכפול בחזקה )נרשום אותה משמאל ל- ( א נחסר אחד מהחזקה ב 7 y כאשר גוזרים כופלים בחזקה, 7 כלומר נרשום אותה משמאל ל-, ובחזקה של
פתרון וחקירת מערכות של משוואות לינאריות שאלות: 1( מצא אילו מהמערכות הבאות הן מערכות שקולות: 2x+ y= 4 x+ y= 3 x y = 0 2x+ y = 3 x+ 10y= 11 א. 2x 2y= 0
 פתרון וחקירת מערכות של משוואות לינאריות שאלות: 1( מצא אילו מהמערכות הבאות הן מערכות שקולות: x+ y= x+ y= 3 x y = 0 x+ y = 3 x+ 10y= 11 x y= 0 x y= 7 x y= 1 ד x = 3 x+ y = z+ t = 8 רשום את המטריצות המתאימות
פתרון וחקירת מערכות של משוואות לינאריות שאלות: 1( מצא אילו מהמערכות הבאות הן מערכות שקולות: x+ y= x+ y= 3 x y = 0 x+ y = 3 x+ 10y= 11 x y= 0 x y= 7 x y= 1 ד x = 3 x+ y = z+ t = 8 רשום את המטריצות המתאימות
Microsoft Word - 28
 8-6-7-8 - פתרון מבחן מס' 8 (ספר לימוד שאלון 87) y M (, ) y מרכז המעגל החוסם את המשולש נמצא בנקודת חיתוך האנכים האמצעיים y y לצלעות המשולש: y M _, y y R M ( M) ( M) () R M y m 9 9 69 9 9 9 9 (ב) משוואת
8-6-7-8 - פתרון מבחן מס' 8 (ספר לימוד שאלון 87) y M (, ) y מרכז המעגל החוסם את המשולש נמצא בנקודת חיתוך האנכים האמצעיים y y לצלעות המשולש: y M _, y y R M ( M) ( M) () R M y m 9 9 69 9 9 9 9 (ב) משוואת
מקביליות
 תכונות בטיחות Safety Properties גרא וייס המחלקה למדעי המחשב אוניברסיטת בן-גוריון 2 תזכורת: תכונות זמן ליניארי Linear Time Properties תכונות זמן-ליניארי מתארות קבוצת עקבות שהמערכת צריכה לייצר מכוונים ללוגיקה
תכונות בטיחות Safety Properties גרא וייס המחלקה למדעי המחשב אוניברסיטת בן-גוריון 2 תזכורת: תכונות זמן ליניארי Linear Time Properties תכונות זמן-ליניארי מתארות קבוצת עקבות שהמערכת צריכה לייצר מכוונים ללוגיקה
08-78-(2004)
") שאלון 00 מיקוד במתמטיקה מהדורת חורף תשס"ט 009 כתיבה: זיקרי אלברט, שמש שלמה - shemesh4@walla.co.il צוות עריכה מקצועית: ריטרבנד אוהד, נאות רז, מן מנחם, דוד ניר, ארביב עמוס, שטולבך אירית, שניידר איתן, כהן
שאלון 00 מיקוד במתמטיקה מהדורת חורף תשס"ט 009 כתיבה: זיקרי אלברט, שמש שלמה - shemesh4@walla.co.il צוות עריכה מקצועית: ריטרבנד אוהד, נאות רז, מן מנחם, דוד ניר, ארביב עמוס, שטולבך אירית, שניידר איתן, כהן
Microsoft Word - אלגברה מעורב 2.doc
 תרגול אלגברה? ( ), (6 ) 6 9 נתון:. מהו ערכו של. () () () (). למה שווה? a ai. נתון: a + 9 + 6a () () 7 () () אף תשובה אינה נכונה?. ( ) ( + ) ( ) ( + ) ( + ) ( + ) ( + )( ) () () () (). נתון: + 0 z z z iz
תרגול אלגברה? ( ), (6 ) 6 9 נתון:. מהו ערכו של. () () () (). למה שווה? a ai. נתון: a + 9 + 6a () () 7 () () אף תשובה אינה נכונה?. ( ) ( + ) ( ) ( + ) ( + ) ( + ) ( + )( ) () () () (). נתון: + 0 z z z iz
מתמטיקה של מערכות
 מתמטיקה של מערכות פתרון לתרגיל נגזור את שני האגפים לפי ונקבל : ) ולכן נתון ש- אז א ) e e נתון ש- א ) נגזור את שני האגפים לפי ונקבל: e, ולכן ) e e e ונקבל: נחלק את שני האגפים ב- נתון ש- ו- וגם ש- פונקציות
מתמטיקה של מערכות פתרון לתרגיל נגזור את שני האגפים לפי ונקבל : ) ולכן נתון ש- אז א ) e e נתון ש- א ) נגזור את שני האגפים לפי ונקבל: e, ולכן ) e e e ונקבל: נחלק את שני האגפים ב- נתון ש- ו- וגם ש- פונקציות
תשובות מלאות לבחינת הבגרות במתמטיקה מועד ג' תשע"ד, מיום 0/8/0610 שאלונים: 313, מוצע על ידי בית הספר לבגרות ולפסיכומטרי של אבירם פלדמן שאלה מספר
 תשובות מלאות לבחינת הבגרות במתמטיקה מועד ג' תשע"ד, מיום 0/8/0610 שאלונים: 313, 635863 מוצע על ידי בית הספר לבגרות ולפסיכומטרי של אבירם פלדמן שאלה מספר 1 נתון: 1 תלמיד קנה 11 מחברות דקות ו- 4 מחברות עבות,
תשובות מלאות לבחינת הבגרות במתמטיקה מועד ג' תשע"ד, מיום 0/8/0610 שאלונים: 313, 635863 מוצע על ידי בית הספר לבגרות ולפסיכומטרי של אבירם פלדמן שאלה מספר 1 נתון: 1 תלמיד קנה 11 מחברות דקות ו- 4 מחברות עבות,
א. נציג את השרטוט המתאים ונסביר בהמשך: שטח המשולש גדול פי משטח המשולש בגרות סט יולי 09 מועד קיץ ב שאלון CAE, CEB כאשר לשני המשולשים גובה משותף
 א. נציג את השרטוט המתאים ונסביר בהמשך: שטח המשולש גדול פי משטח המשולש 3 CAE, CEB כאשר לשני המשולשים גובה משותף, E בהתאמה. לכן, הנקודה BE.3: לצלעות AE מחלקת את ו- AB ביחס של ע"פ נוסחת חלוקת קטע ביחס נתון
א. נציג את השרטוט המתאים ונסביר בהמשך: שטח המשולש גדול פי משטח המשולש 3 CAE, CEB כאשר לשני המשולשים גובה משותף, E בהתאמה. לכן, הנקודה BE.3: לצלעות AE מחלקת את ו- AB ביחס של ע"פ נוסחת חלוקת קטע ביחס נתון
תכנון אלגוריתמים, אביב 1021, תרגול מס' 4 תכנון דינאמי תכנון דינאמי בתרגול זה נדון בבעיית הכפלת סדרת מטריצות (16.1.(CLR ראשית נראה דוגמא: דוגמא: תהינה
 תכנון דינאמי בתרגול זה נדון בבעיית הכפלת סדרת מטריצות (6..(CLR ראשית נראה דוגמא: דוגמא: תהינה ארבע מטריצות:. A, A, A, A נסמן את גודל המטריצות בסדרה ע"י סדרת גדלים כאשר, p 5 5 p היא בגודל A {,,,5,}, P כלומר
תכנון דינאמי בתרגול זה נדון בבעיית הכפלת סדרת מטריצות (6..(CLR ראשית נראה דוגמא: דוגמא: תהינה ארבע מטריצות:. A, A, A, A נסמן את גודל המטריצות בסדרה ע"י סדרת גדלים כאשר, p 5 5 p היא בגודל A {,,,5,}, P כלומר
PowerPoint Presentation
 מה הם הגורמים שקובעים את רמת הפעילות הכלכלית, שער הריבית, רמת המחירים ורמת התעסוקה? הפעילות המשותפת במספר שווקים: פעילות ריאלית שוק הסחורות: CIGX-M עקומת IS (r,) שיווי משק ל פעילות מונטרית שוק הכספים:
מה הם הגורמים שקובעים את רמת הפעילות הכלכלית, שער הריבית, רמת המחירים ורמת התעסוקה? הפעילות המשותפת במספר שווקים: פעילות ריאלית שוק הסחורות: CIGX-M עקומת IS (r,) שיווי משק ל פעילות מונטרית שוק הכספים:
מבוא לאנליזה נומרית na191 Assignment 2 solution - Finding Roots of Nonlinear Equations y cos(x) שאלה 1 היכן נחתכים הגרפים של? y x 3 1 ושל ממש פתרונות
 שאלה 1 היכן נחתכים הגרפים של? y x 3 1 ושל ממש פתרונות") מבוא לאנליזה נומרית na191 Assignmnt 2 solution - Finding Roots of Nonlinar Equations y cos() שאלה 1 היכן נחתכים הגרפים של? y 3 1 ושל ממש פתרונות בעזרת שיטת החצייה ובעזרת Rgula Falsi )אין צורך לפתור אנליטית(
מבוא לאנליזה נומרית na191 Assignmnt 2 solution - Finding Roots of Nonlinar Equations y cos() שאלה 1 היכן נחתכים הגרפים של? y 3 1 ושל ממש פתרונות בעזרת שיטת החצייה ובעזרת Rgula Falsi )אין צורך לפתור אנליטית(
אלקטרוניקה ומשבים ה-תשס"ה
 גמר לבתי ספר לטכנאים ולהנדסאים סוג הבחינה: מדינת ישראל אביב תשס"ה, 5 מועד הבחינה: משרד החינוך 755 סמל השאלון: נוסחאון בתורת הרשת א. נספחים: לכיתה י"ד נוסחאון באלקטרוניקה ספרתית ב. לכיתה י"ד אלקטרוניקה
גמר לבתי ספר לטכנאים ולהנדסאים סוג הבחינה: מדינת ישראל אביב תשס"ה, 5 מועד הבחינה: משרד החינוך 755 סמל השאלון: נוסחאון בתורת הרשת א. נספחים: לכיתה י"ד נוסחאון באלקטרוניקה ספרתית ב. לכיתה י"ד אלקטרוניקה
Microsoft Word - ExamA_Final_Solution.docx
 סמסטר חורף תשע"א 18 בפבואר 011 הטכניון מכון טכנולוגי לישראל הפקולטה למדעי המחשב מרצה: מתרגלים: רן אל-יניב נועה אלגרבלי, גיא חפץ, נטליה זילברשטיין, דודו ינאי (אחראי) סמסטר חורף תשע" מבחן סופי פתרון (מועד
סמסטר חורף תשע"א 18 בפבואר 011 הטכניון מכון טכנולוגי לישראל הפקולטה למדעי המחשב מרצה: מתרגלים: רן אל-יניב נועה אלגרבלי, גיא חפץ, נטליה זילברשטיין, דודו ינאי (אחראי) סמסטר חורף תשע" מבחן סופי פתרון (מועד
Microsoft Word - tutorial Dynamic Programming _Jun_-05.doc
 הטכניון מכון טכנולוגי לישראל אלגוריתמים (3447) סמסטר חורף 006/007 הפקולטה למדעי המחשב תכנון דינאמי תרגיל תת מחרוזת משותפת ארוכה ביותר תת-מחרוזת z k שקיימת סדרה עולה ממש,... z = z של מחרוזת נתונה x m,...,,
הטכניון מכון טכנולוגי לישראל אלגוריתמים (3447) סמסטר חורף 006/007 הפקולטה למדעי המחשב תכנון דינאמי תרגיל תת מחרוזת משותפת ארוכה ביותר תת-מחרוזת z k שקיימת סדרה עולה ממש,... z = z של מחרוזת נתונה x m,...,,
סט נובמבר 08 מועד מיוחד - פתרונות עפר.doc
 נפתור את מערכת המשוואות y+ 3 = 5 5 7 3 2y + = 8 3 נארגן את המשוואה הראשונה 1/ 5/ y+ 3 5 = 5 1 y+ 3= 5(5 ) y+ 3= 25 5 8+ y= 25 /5 נארגן את המשוואה השנייה 3 1 3 / / / 2y 7 3 8 + = 1 3 1 6y+ 7 3= 24 7+ 6y
נפתור את מערכת המשוואות y+ 3 = 5 5 7 3 2y + = 8 3 נארגן את המשוואה הראשונה 1/ 5/ y+ 3 5 = 5 1 y+ 3= 5(5 ) y+ 3= 25 5 8+ y= 25 /5 נארגן את המשוואה השנייה 3 1 3 / / / 2y 7 3 8 + = 1 3 1 6y+ 7 3= 24 7+ 6y
משוואות דפרנציאליות רגילות /ח
 qwertyuiopasdfghjklzxcvbnmqwerty Version 10 uiopasdfghjklzxcvbnmqwertyuiopasd fghjklzxcvbnmqwertyuiopasdfghjklzx cvbnmqwertyuiopasdfghjklzxcvbnmq משוואות דפרנציאליות רגילות /ח wertyuiopasdfghjklzxcvbnmqwertyui
qwertyuiopasdfghjklzxcvbnmqwerty Version 10 uiopasdfghjklzxcvbnmqwertyuiopasd fghjklzxcvbnmqwertyuiopasdfghjklzx cvbnmqwertyuiopasdfghjklzxcvbnmq משוואות דפרנציאליות רגילות /ח wertyuiopasdfghjklzxcvbnmqwertyui
Limit
 פרק אינטגרל כפול לכן לפי משפט 55 )ראו גם את ההערה( שאלות :5 d cos( ) d [ ] [] שאלות עם פתרון שאלה 5 חשבו: פתרון 8 הפונקציה ) f ( ) cos( מתקיים: רציפה במלבן d cos( ) d d cos( ) d עדיף לחשב את האינטגרל השני:
פרק אינטגרל כפול לכן לפי משפט 55 )ראו גם את ההערה( שאלות :5 d cos( ) d [ ] [] שאלות עם פתרון שאלה 5 חשבו: פתרון 8 הפונקציה ) f ( ) cos( מתקיים: רציפה במלבן d cos( ) d d cos( ) d עדיף לחשב את האינטגרל השני:
Microsoft Word - SDAROT 806 PITRONOT.doc
 5 יח"ל - תרגילים הכנה לבגרות תרגיל 8 נסמן ב- את האיבר הראשון ונסמן ב- את מנת הסדרה. על פי הנתון מתקיים: 6 ( S6 89 89 0 5 0 5 S0 S5 ( 0 5 0 t t 0 6 (. לפיכך, 89 5 נסמן t ונקבל: 5 t או או או 5 t נפסול את
5 יח"ל - תרגילים הכנה לבגרות תרגיל 8 נסמן ב- את האיבר הראשון ונסמן ב- את מנת הסדרה. על פי הנתון מתקיים: 6 ( S6 89 89 0 5 0 5 S0 S5 ( 0 5 0 t t 0 6 (. לפיכך, 89 5 נסמן t ונקבל: 5 t או או או 5 t נפסול את
מעבדה א' בפיזיקה הענות לתדר ותהודה רקע תאורטי תשע"ב נגד, קבל וסליל במעגלים חשמליים בניסוי זה נחקור את התנהגותם של מעגלים חשמליים המכילים נגדים קבלים ו
 נגד, קבל וסליל במעגלים חשמליים בניסוי זה נחקור את התנהגותם של מעגלים חשמליים המכילים נגדים קבלים וסלילים )משרנים(. ראשית נראה כיצד משפיע כל אחד מהרכיבים הללו על המתח במעגל. נגד חוק אוהם: במהלך לימודיכם
נגד, קבל וסליל במעגלים חשמליים בניסוי זה נחקור את התנהגותם של מעגלים חשמליים המכילים נגדים קבלים וסלילים )משרנים(. ראשית נראה כיצד משפיע כל אחד מהרכיבים הללו על המתח במעגל. נגד חוק אוהם: במהלך לימודיכם
מועד: א בחינה סופית במתמטיקה דיסקרטית משך הבחינה: 2 1 שעות מרצה: פרופ' תאופיק מנסור תאריך: סמסטר: א תשע"ח m 2 הוראות לנבחן: )1( הבחינה מו
1( הבחינה מו") מועד: א בחינה סופית במתמטיקה דיסקרטית משך הבחינה: 2 1 שעות מרצה: פרופ' תאופיק מנסור תאריך: 26.01.2018 2 סמסטר: א תשע"ח m 2 הוראות לנבחן: )1( הבחינה מורכבת מ- 6 שאלות. כל שאלה מזכה ב- 20 נקודות כך הנקודות
מועד: א בחינה סופית במתמטיקה דיסקרטית משך הבחינה: 2 1 שעות מרצה: פרופ' תאופיק מנסור תאריך: 26.01.2018 2 סמסטר: א תשע"ח m 2 הוראות לנבחן: )1( הבחינה מורכבת מ- 6 שאלות. כל שאלה מזכה ב- 20 נקודות כך הנקודות
<4D F736F F D20F4FAF8E5EF20EEE5F2E320E020F1EEF1E8F820E120FAF9F2E3>
 האקדמית תל אביב-יפו מבוא ללוגיקה ותורת הקבוצות מועד א' סמסטר ב' תשע"ד הפתרון לא נכתב על ידי גורם רשמי ובהחלט יכול להיות שנפלו טעויות פה ושם עשיתי כמיטב יכולתי אבל תשימו לב ותפעילו שיקול דעת אשמח לשמוע
האקדמית תל אביב-יפו מבוא ללוגיקה ותורת הקבוצות מועד א' סמסטר ב' תשע"ד הפתרון לא נכתב על ידי גורם רשמי ובהחלט יכול להיות שנפלו טעויות פה ושם עשיתי כמיטב יכולתי אבל תשימו לב ותפעילו שיקול דעת אשמח לשמוע
פתרונות לשאלות ממבחנים עוזי וישנה, 1996 השאלות לקוחות ממבחנים של פרופ' א. רואן. הפתרונות מוצגים באופן תמציתי, ויתכן שבמבחן כדאי להרחיב יותר. קובץ זה נ
 פתרונות לשאלות ממבחנים עוזי וישנה, 1996 השאלות לקוחות ממבחנים של פרופ' א. רואן. הפתרונות מוצגים באופן תמציתי, ויתכן שבמבחן כדאי להרחיב יותר. קובץ זה נכתב במקור בתוכנת,Oren ותורגם באופן אוטומטי למחצה ל
פתרונות לשאלות ממבחנים עוזי וישנה, 1996 השאלות לקוחות ממבחנים של פרופ' א. רואן. הפתרונות מוצגים באופן תמציתי, ויתכן שבמבחן כדאי להרחיב יותר. קובץ זה נכתב במקור בתוכנת,Oren ותורגם באופן אוטומטי למחצה ל
עב 001 ינואר 12 מועד חורף פתרונות עפר
 ק( נסמן ב- את מהירות המשאית שיצאה מעיר A (קמ"ש, קבועה) בגרות עב ינואר מועד חורף שאלון 35 נסמן ב- y את מהירות המכונית שיצאה מעיר B (קמ"ש, קבועה) B A נסמן ב- s את המרחק מעיר לעיר "מ) s v עד מפגש ראשון משאית
ק( נסמן ב- את מהירות המשאית שיצאה מעיר A (קמ"ש, קבועה) בגרות עב ינואר מועד חורף שאלון 35 נסמן ב- y את מהירות המכונית שיצאה מעיר B (קמ"ש, קבועה) B A נסמן ב- s את המרחק מעיר לעיר "מ) s v עד מפגש ראשון משאית
67865 כלים מתמטיים 7 בינואר 2014 מרצה: מיכאל בן אור מתרגל: צור לוריא איני לוקחת אחריות על מה שכתוב כאן, so tread lightly אין המרצה קשור לסיכום זה בשום
 67865 כלים מתמטיים 7 בינואר 2014 מרצה: מיכאל בן אור מתרגל: צור לוריא איני לוקחת אחריות על מה שכתוב כאן, so tread lightly אין המרצה קשור לסיכום זה בשום דרך הערות יתקבלו בברכה nogarotman@gmailcom אהבתם?
67865 כלים מתמטיים 7 בינואר 2014 מרצה: מיכאל בן אור מתרגל: צור לוריא איני לוקחת אחריות על מה שכתוב כאן, so tread lightly אין המרצה קשור לסיכום זה בשום דרך הערות יתקבלו בברכה nogarotman@gmailcom אהבתם?
א"ודח ב2 גרבימ הרש 1 רפסמ האצרה סקוטס טפשמו בחרמב םיווק םילרגטניא 13 בחרמב ינש גוסמ יוק לרגטניא L יהי :ידי לע ירטמרפ ןפואב ראותמה בחרמב קלח םוקע (x(t)
") א"ודח ב גרבימ הרש רפסמ האצרה סקוטס טפשמו בחרמב םיווק םילרגטניא בחרמב ינש גוסמ יוק לרגטניא יהי :ידי לע ירטמרפ ןפואב ראותמה בחרמב קלח םוקע ttt t r רשאכ ttt :עטקב תופיצר תורזגנ תולעב [ab]. יהי F תופיצר תורזגנ
א"ודח ב גרבימ הרש רפסמ האצרה סקוטס טפשמו בחרמב םיווק םילרגטניא בחרמב ינש גוסמ יוק לרגטניא יהי :ידי לע ירטמרפ ןפואב ראותמה בחרמב קלח םוקע ttt t r רשאכ ttt :עטקב תופיצר תורזגנ תולעב [ab]. יהי F תופיצר תורזגנ
Microsoft Word - 14
 9-5-27-4 - פתרון מבחן מס' 4 (ספר לימוד שאלון 3586) קמ"ש $ y קמ"ש % ppleסמן ב- קמ"ש את מהירות המכוppleית וב- y קמ"ש את מהירות המשאית () $ y 4 המשאית הגיעה ל- B לאחר המפגש עם המכוppleית כלומר ppleקבל את
9-5-27-4 - פתרון מבחן מס' 4 (ספר לימוד שאלון 3586) קמ"ש $ y קמ"ש % ppleסמן ב- קמ"ש את מהירות המכוppleית וב- y קמ"ש את מהירות המשאית () $ y 4 המשאית הגיעה ל- B לאחר המפגש עם המכוppleית כלומר ppleקבל את
מספר בקשה 3f40e793 6b a0e9 da8f5a75fe53 פרטי המוצרים שלי
 מספר בקשה 3f40e793 6b11 4127 a0e9 da8f5a75fe53 פרטי המוצרים שלי 68 270 224092 70 68 270 224092 69 3967487 3967486 3966858 3966275 3957822 1634818 סוג מוצר פנסיוני פוליסת ביטוח חיים משולב חיסכון קרן השתלמות
מספר בקשה 3f40e793 6b11 4127 a0e9 da8f5a75fe53 פרטי המוצרים שלי 68 270 224092 70 68 270 224092 69 3967487 3967486 3966858 3966275 3957822 1634818 סוג מוצר פנסיוני פוליסת ביטוח חיים משולב חיסכון קרן השתלמות
מדינת ישראל משרד החינוך נוסחאות ונתונים בפיזיקה נספח לכל בחינות הבגרות ברמה של 5 יח"ל תוכן העניינים נוסחאות עמוד מכניקה 2 אלקטרומגנטיות 3 קרינה וחומר
 מדינת ישראל משרד החינוך נוסחאות ונתונים בפיזיקה נספח לכל בחינות הבגרות ברמה של 5 יח"ל תוכן העניינים נוסחאות עמוד מכניקה אלקטרומגנטיות 3 קרינה וחומר 5 פעילויות מעבדה 6 נתונים עמוד קבועים בסיסיים 6 פירוש
מדינת ישראל משרד החינוך נוסחאות ונתונים בפיזיקה נספח לכל בחינות הבגרות ברמה של 5 יח"ל תוכן העניינים נוסחאות עמוד מכניקה אלקטרומגנטיות 3 קרינה וחומר 5 פעילויות מעבדה 6 נתונים עמוד קבועים בסיסיים 6 פירוש
PRESENTATION NAME
 נכתב ע"י כרמי גרושקו. כל הזכויות שמורות 2010 הטכניון, מכון טכנולוגי לישראל הקצאה דינמית )malloc( מערכים דו-מימדיים סיבוכיות: ניתוח כזכור, כדי לאחסן מידע עלינו לבקש זכרון ממערכת ההפעלה. 2 עד עכשיו: הגדרנו
נכתב ע"י כרמי גרושקו. כל הזכויות שמורות 2010 הטכניון, מכון טכנולוגי לישראל הקצאה דינמית )malloc( מערכים דו-מימדיים סיבוכיות: ניתוח כזכור, כדי לאחסן מידע עלינו לבקש זכרון ממערכת ההפעלה. 2 עד עכשיו: הגדרנו
סז 002 נואר 07 מועד חורף פתרונות עפר
 הציר האופקי מציג את מספר פעימות המונה הציר האנכי מציג את המחיר שגובה חברת הטלפונים (שקלים) ב. א. יש למצוא מהו המחיר ל- 00 פעימות המונה הראשונות בחודש. הנקודה המסומנת בגרף, בעיגול, מראה כי עבור 00 פעימות
הציר האופקי מציג את מספר פעימות המונה הציר האנכי מציג את המחיר שגובה חברת הטלפונים (שקלים) ב. א. יש למצוא מהו המחיר ל- 00 פעימות המונה הראשונות בחודש. הנקודה המסומנת בגרף, בעיגול, מראה כי עבור 00 פעימות
תרגול 1
 תרגול rcsin d rcsin t d שאלה חשב את האינטגרלים המסוימים הבאים: sin cos d rcsin d sin cos d א ב ג פתרון שאלה סעיף א נציב dt sin d t cos עבור נקבל t cos cos עבור נקבל sin cos d tdt סעיף ב נפתור תחילה בעזרת
תרגול rcsin d rcsin t d שאלה חשב את האינטגרלים המסוימים הבאים: sin cos d rcsin d sin cos d א ב ג פתרון שאלה סעיף א נציב dt sin d t cos עבור נקבל t cos cos עבור נקבל sin cos d tdt סעיף ב נפתור תחילה בעזרת
תרגיל 5-1
 תרגיל 1 יחסי העדפה, פונקציות תועלת, עקומות אדישות וקווי תקציב כל השאלות להלן מתייחסות לצרכן שהעדפותיו מוגדרות על סלי צריכה של שני מוצרים. העדפות אלה הן רציונאליות (ז"א, מקיימות את תכונות השלמות והטרנזיטיביות).
תרגיל 1 יחסי העדפה, פונקציות תועלת, עקומות אדישות וקווי תקציב כל השאלות להלן מתייחסות לצרכן שהעדפותיו מוגדרות על סלי צריכה של שני מוצרים. העדפות אלה הן רציונאליות (ז"א, מקיימות את תכונות השלמות והטרנזיטיביות).
ע 001 ינואר 10 מועד חורף פתרונות עפר
 בגרות ע 00 ינואר 0 שאלון 50 הציר האופקי, ציר ה-, x מתאר את הזמן שעובר, בשניות, מתחילת השחייה כל משבצת היא בת 0 שניות הציר האנכי, ציר ה - y, מתאר את המרחק מקצה הבר כה כל משבצת היא בת 0 מטר כאשר הקו עולה
בגרות ע 00 ינואר 0 שאלון 50 הציר האופקי, ציר ה-, x מתאר את הזמן שעובר, בשניות, מתחילת השחייה כל משבצת היא בת 0 שניות הציר האנכי, ציר ה - y, מתאר את המרחק מקצה הבר כה כל משבצת היא בת 0 מטר כאשר הקו עולה
שיעור 1
 שיעור קצב גדילת פונקציות אנחנו בודקים את היעילות האסימפטותית של האלגוריתם, כיצד גדל זמן הריצה כאשר גודל הקלט גדל ללא גבול. בדר"כ אלגוריתמים עם "סיבוכיות" ריצה טובה יותר יהיו יעילים יותר מלבד לקלטים קצרים
שיעור קצב גדילת פונקציות אנחנו בודקים את היעילות האסימפטותית של האלגוריתם, כיצד גדל זמן הריצה כאשר גודל הקלט גדל ללא גבול. בדר"כ אלגוריתמים עם "סיבוכיות" ריצה טובה יותר יהיו יעילים יותר מלבד לקלטים קצרים
5-PhysicsFormula.indd
 מדינת ישראל משרד החינוך נוסחאות ונתונים בפיזיקה נספח לכל בחינות הבגרות ברמה של 5 יח"ל תוכן העניינים נוסחאות עמוד מכניקה אלקטרומגנטיות 3 קרינה וחומר 5 פעילויות מעבדה 6 נתונים עמוד קבועים בסיסיים 6 פירוש
מדינת ישראל משרד החינוך נוסחאות ונתונים בפיזיקה נספח לכל בחינות הבגרות ברמה של 5 יח"ל תוכן העניינים נוסחאות עמוד מכניקה אלקטרומגנטיות 3 קרינה וחומר 5 פעילויות מעבדה 6 נתונים עמוד קבועים בסיסיים 6 פירוש
פיסיקה 1 ב' מרצים: גולן בל, משה שכטר, מיכאל גדלין מועד ב משך המבחן 3 שעות חומר עזר: דף נוסחאות מצורף, מחשבון אסור בהצלחה! חלק א'
 פיסיקה 1 ב' 203-1-1391 מרצים: גולן בל, משה שכטר, מיכאל גדלין מועד ב 03.08.2017 משך המבחן 3 שעות חומר עזר: דף נוסחאות מצורף, מחשבון אסור בהצלחה! חלק א' - שאלות אמריקאיות (כל שאלה - 5 נק') - יש לסמן תשובה
פיסיקה 1 ב' 203-1-1391 מרצים: גולן בל, משה שכטר, מיכאל גדלין מועד ב 03.08.2017 משך המבחן 3 שעות חומר עזר: דף נוסחאות מצורף, מחשבון אסור בהצלחה! חלק א' - שאלות אמריקאיות (כל שאלה - 5 נק') - יש לסמן תשובה
Microsoft Word - 01 difernziali razionalit
 פונקציות רציונליות 5 יחידות מתוך הספר 806 כרך ד' 0, כל הזכויות שמורות ל ואריק דז'לדטי חל איסור מוחלט לתרגם, להעתיק או לשכפל חוברת זו או קטעים ממנה, בשום צורה ובשום אמצעי אלקטרוני, אופטי או מכני (לרבות
פונקציות רציונליות 5 יחידות מתוך הספר 806 כרך ד' 0, כל הזכויות שמורות ל ואריק דז'לדטי חל איסור מוחלט לתרגם, להעתיק או לשכפל חוברת זו או קטעים ממנה, בשום צורה ובשום אמצעי אלקטרוני, אופטי או מכני (לרבות
שאלון להערכה עצמית במתמטיקה לקראת לימודי שנה א מדוע להתכונן לשנה א מסלולי לימוד רבים באוניברסיטה (מדעי המחשב, הנדסה, פיזיקה וכמובן מתמטיקה) דורשים לימ
 דורשים לימ") שאלון להערכה עצמית במתמטיקה לקראת לימודי שנה א מדוע להתכונן לשנה א מסלולי לימוד רבים באוניברסיטה (מדעי המחשב, הנדסה, פיזיקה וכמובן מתמטיקה) דורשים לימודי מתמטיקה בשנה א. אין מבחני כניסה לקורסים אלו, אולם
שאלון להערכה עצמית במתמטיקה לקראת לימודי שנה א מדוע להתכונן לשנה א מסלולי לימוד רבים באוניברסיטה (מדעי המחשב, הנדסה, פיזיקה וכמובן מתמטיקה) דורשים לימודי מתמטיקה בשנה א. אין מבחני כניסה לקורסים אלו, אולם
rizufim answers
 ÌÈÙÂˆÈ מדריך למורה פעילות זו היא פעילות חקר לבדיקת כל אפשרויות הריצוף שבהן סידור מצולעים סביב קודקוד הוא זהה. המצולעים שבהם ישתמשו התלמידים הם: משולש שווה צלעות, משושה משוכלל וריבוע - כולם בעלי צלע באותו
ÌÈÙÂˆÈ מדריך למורה פעילות זו היא פעילות חקר לבדיקת כל אפשרויות הריצוף שבהן סידור מצולעים סביב קודקוד הוא זהה. המצולעים שבהם ישתמשו התלמידים הם: משולש שווה צלעות, משושה משוכלל וריבוע - כולם בעלי צלע באותו
רשימת דגמי מסגת בטיחות ותאי בטיחות מאושרים
 רשימת דגמי בטיחות ותאי בטיחות מאושרים על פי תקנות הבטיחות בעבודה ) בחקלאות(, תשל"ב- 2791 הרשימה מעודכנת לתאריך 40/12//014 תאור Same Deutch Fahr Group חברה ישראלית לרכב וחלפים פתוח SLH T57 Same Rowcrop
רשימת דגמי בטיחות ותאי בטיחות מאושרים על פי תקנות הבטיחות בעבודה ) בחקלאות(, תשל"ב- 2791 הרשימה מעודכנת לתאריך 40/12//014 תאור Same Deutch Fahr Group חברה ישראלית לרכב וחלפים פתוח SLH T57 Same Rowcrop
גמר לבתי ספר לטכנאים ולהנדסאים סוג הבחינה: מדינת ישראל אביב תשע"ב 2012 מועד הבחינה: משרד החינוך סמל השאלון: נספחים: א. נוסחאות באווירודינמיקה ו
 גמר לבתי ספר לטכנאים ולהנדסאים סוג הבחינה: מדינת ישראל אביב תשע"ב 0 מועד הבחינה: משרד החינוך 70933 סמל השאלון: נספחים: א. נוסחאות באווירודינמיקה ומנועי מטוס ב. טבלת אטמוספרה סטנדרטית אווירודינמיקה ומנועי
גמר לבתי ספר לטכנאים ולהנדסאים סוג הבחינה: מדינת ישראל אביב תשע"ב 0 מועד הבחינה: משרד החינוך 70933 סמל השאלון: נספחים: א. נוסחאות באווירודינמיקה ומנועי מטוס ב. טבלת אטמוספרה סטנדרטית אווירודינמיקה ומנועי
חשבון אינפיניטסימלי מתקדם 1
 חשבון אינפיניטסימלי מתקדם הסיכומים של דינה מבוסס על הרצאות ותרגולים מאת: פרופ' רז קופרמן מר אורי שפירא ירושלים 007 תוכן עניינים מרחבים מטריים 3 נספח א' נספח ב' הגדרות ודוגמאות 3 קבוצות מיוחדות במרחב מטרי
חשבון אינפיניטסימלי מתקדם הסיכומים של דינה מבוסס על הרצאות ותרגולים מאת: פרופ' רז קופרמן מר אורי שפירא ירושלים 007 תוכן עניינים מרחבים מטריים 3 נספח א' נספח ב' הגדרות ודוגמאות 3 קבוצות מיוחדות במרחב מטרי
Book.indb
 גמר לבתי ספר לטכנאים ולהנדסאים סוג הבחינה: מדינת ישראל אביב תשס"ו, 006 מועד הבחינה: משרד החינוך, התרבות והספורט 750005 סמל השאלון: א. משך הבחינה: ארבע שעות. נספחים: א. נוסחאון בתורת הרשת בשאלון זה 8 עמודים
גמר לבתי ספר לטכנאים ולהנדסאים סוג הבחינה: מדינת ישראל אביב תשס"ו, 006 מועד הבחינה: משרד החינוך, התרבות והספורט 750005 סמל השאלון: א. משך הבחינה: ארבע שעות. נספחים: א. נוסחאון בתורת הרשת בשאלון זה 8 עמודים
הטכניון מכון טכנולוגי לישראל אלגוריתמים 1 )443432( סמסטר חורף הפקולטה למדעי המחשב תרגול 9 מסלולים קלים ביותר תרגיל APSP - 1 עד כה דנו באלגור
443432( סמסטר חורף הפקולטה למדעי המחשב תרגול 9 מסלולים קלים ביותר תרגיל APSP - 1 עד כה דנו באלגור") תרגול 9 מסלולים קלים ביותר תרגיל APSP - 1 עד כה דנו באלגוריתמים לפתרון בעית מסלולים קלים מציאת מסלולים קלים ביותר מצומת ביותר ממקור יחיד. כלומר, V לכל צמתי הגרף. בעיה אחרת הקשורה לבעיה זו היא בעית ה-(
תרגול 9 מסלולים קלים ביותר תרגיל APSP - 1 עד כה דנו באלגוריתמים לפתרון בעית מסלולים קלים מציאת מסלולים קלים ביותר מצומת ביותר ממקור יחיד. כלומר, V לכל צמתי הגרף. בעיה אחרת הקשורה לבעיה זו היא בעית ה-(
1 בגרות עח יולי 18 מועד קיץ ב שאלון x b 2 2 y x 6x שיעור ה- א x לכן, של קדקוד הפרבולה, ו-, מתקבל על ידי הנוסחה a. C(3, 9) ובהתאם, y. (3, 9) 2 C
 ובהתאם, y. (3, 9) 2 C") 8 מועד קיץ ב שאלון 58 x b y x x שיעור ה- א x לכן של קדקוד הפרבולה ו- מתקבל על ידי הנוסחה a C( 9) ובהתאם y ( 9) C 9 C הם x C ( ) תשובה: שיעורי קדקוד הפרבולה B A y x x ב הישר y 5 חותך את הפרבולה בנקודות
8 מועד קיץ ב שאלון 58 x b y x x שיעור ה- א x לכן של קדקוד הפרבולה ו- מתקבל על ידי הנוסחה a C( 9) ובהתאם y ( 9) C 9 C הם x C ( ) תשובה: שיעורי קדקוד הפרבולה B A y x x ב הישר y 5 חותך את הפרבולה בנקודות
פקולטה: מחלקה: שם הקורס: קוד הקורס: מדעי הטבע מדעי המחשב ומתמטיקה מתמטיקה בדידה תאריך בחינה: _ 07/07/2015 משך הבחינה: 3 שעות סמ' _ב' מועד
 פקולטה: מחלקה: שם הקורס: קוד הקורס: מדעי הטבע מדעי המחשב ומתמטיקה מתמטיקה בדידה 2-7012610-3 תאריך בחינה: _ 07/07/2015 משך הבחינה: 3 שעות סמ' _ב' מועד ב' שם המרצה: ערן עמרי, ענת פסקין-צ'רניאבסקי חומר עזר:
פקולטה: מחלקה: שם הקורס: קוד הקורס: מדעי הטבע מדעי המחשב ומתמטיקה מתמטיקה בדידה 2-7012610-3 תאריך בחינה: _ 07/07/2015 משך הבחינה: 3 שעות סמ' _ב' מועד ב' שם המרצה: ערן עמרי, ענת פסקין-צ'רניאבסקי חומר עזר:
Microsoft Word - c_SimA_MoedA2006.doc
 מבוא למדעי המחשב בחינת מועד א', סמסטר א' תשס"ו,..006 מרצה: מתרגלת: גב' יעל כהן-סיגל. גב' ליאת לוונטל. משך המבחן: שעתיים וחצי. חומר עזר: מותר כל חומר עזר, מלבד מחשב. הנחיות:. יש לענות על כל השאלות.. קראו
מבוא למדעי המחשב בחינת מועד א', סמסטר א' תשס"ו,..006 מרצה: מתרגלת: גב' יעל כהן-סיגל. גב' ליאת לוונטל. משך המבחן: שעתיים וחצי. חומר עזר: מותר כל חומר עזר, מלבד מחשב. הנחיות:. יש לענות על כל השאלות.. קראו
פיסיקה למתמטיקאים 6 באפריל 2017
 פיסיקה למתמטיקאים 6 באפריל 017 תוכן עניינים 4 הקדמה 1 4 יחידות.................................... 1.1 4 וקטורים................................... 1. 5 אנליזה וקטורית............................... 1.3
פיסיקה למתמטיקאים 6 באפריל 017 תוכן עניינים 4 הקדמה 1 4 יחידות.................................... 1.1 4 וקטורים................................... 1. 5 אנליזה וקטורית............................... 1.3
Tutorial 11
 מבוא לשפת C תרגול 8: מערכים רב-ממדיים תרגילים בנושא מערכים ורקורסיה מבוסס על השקפים שחוברו ע"י שי ארצי, גיתית רוקנשטיין, איתן אביאור וסאהר אסמיר עבור הקורס "מבוא למדעי המחשב" נכתב ע"י טל כהן, עודכן ע"י
מבוא לשפת C תרגול 8: מערכים רב-ממדיים תרגילים בנושא מערכים ורקורסיה מבוסס על השקפים שחוברו ע"י שי ארצי, גיתית רוקנשטיין, איתן אביאור וסאהר אסמיר עבור הקורס "מבוא למדעי המחשב" נכתב ע"י טל כהן, עודכן ע"י
Microsoft Word - nisui5.doc
 ניסוי 5: מדידות בשנאי הספק מטרת הניסוי מדידת הפרמטרים של מעגל התמורה של השנאי. מדידת הפסדים בשנאי. מדידת אופייני העמסה ונצילות של שנאי..1 1.1 1. 1.3 ספרות Sith R.J., Circuit, Device and Syte, John Wiley
ניסוי 5: מדידות בשנאי הספק מטרת הניסוי מדידת הפרמטרים של מעגל התמורה של השנאי. מדידת הפסדים בשנאי. מדידת אופייני העמסה ונצילות של שנאי..1 1.1 1. 1.3 ספרות Sith R.J., Circuit, Device and Syte, John Wiley
Microsoft Word - ניספח_8.doc
 ניסוי 8: מעגלי ישור וסינון איור 3.1: מעגל יישור חד-דרכי איור 3.: מעגל יישור דו-דרכי איור 3.3: מעגל יישור חד-דרכי עם מסנן קיבולי איור 3.4: מעגל יישור דו-דרכי עם מסנן קיבולי 1 התקנים חשמליים רבים זקוקים
ניסוי 8: מעגלי ישור וסינון איור 3.1: מעגל יישור חד-דרכי איור 3.: מעגל יישור דו-דרכי איור 3.3: מעגל יישור חד-דרכי עם מסנן קיבולי איור 3.4: מעגל יישור דו-דרכי עם מסנן קיבולי 1 התקנים חשמליים רבים זקוקים
Microsoft PowerPoint - Lecture8.pptx
 עיבוד נתונים, אמידה וחיזוי תכנית מ.א. בלוגיסטיקה גדעון ויס 1 נתונים מדגם של 12 גברים מאוכלוסית ישראל, מודל ורוחי סמך נמדד הגובה: 175, 181,177, 174,161, 166,168, 175,177, 178, 167, 171 ממוצע המדגם: סטית
עיבוד נתונים, אמידה וחיזוי תכנית מ.א. בלוגיסטיקה גדעון ויס 1 נתונים מדגם של 12 גברים מאוכלוסית ישראל, מודל ורוחי סמך נמדד הגובה: 175, 181,177, 174,161, 166,168, 175,177, 178, 167, 171 ממוצע המדגם: סטית
בקרים מתוכנתים – PLC
 4.2. לאחר בניית מערכת ההנעה נחבר אליה את בקר ה- NXT באופן הבא: איור 19: חיבור הבקר אל מערכת ההנעה 29 5.2. נחבר את הבקר אל מערכת ההנעה באופן הבא: איור : 20 חיבור הסוללות והבקר אל מערכת ההנעה 30 איור : 21
4.2. לאחר בניית מערכת ההנעה נחבר אליה את בקר ה- NXT באופן הבא: איור 19: חיבור הבקר אל מערכת ההנעה 29 5.2. נחבר את הבקר אל מערכת ההנעה באופן הבא: איור : 20 חיבור הסוללות והבקר אל מערכת ההנעה 30 איור : 21
שם בעל הרישיון הפנסיוני מספר בעל הרישיון שם המפקח מגדל מקפת קרנות פנסיה וקופות גמל בע"מ בקשת מבוטח לאישור תשלום פנסיית פרישה טופס מספר 483 הטופס מיועד
 שם בעל הרישיון הפנסיוני מספר בעל הרישיון שם המפקח בקשת מבוטח לאישור תשלום פנסיית פרישה טופס מספר 483 הטופס מיועד לנשים וגברים כאחד יש למלא את הטופס בעט בלבד ולא בעפרון הסבר לבקשה חישוב פנסיית פרישה )פנסיית
שם בעל הרישיון הפנסיוני מספר בעל הרישיון שם המפקח בקשת מבוטח לאישור תשלום פנסיית פרישה טופס מספר 483 הטופס מיועד לנשים וגברים כאחד יש למלא את הטופס בעט בלבד ולא בעפרון הסבר לבקשה חישוב פנסיית פרישה )פנסיית
Microsoft Word - sol9
 תרמודינאמיקה פתרון תרגיל מספר 9 Pl Pl + l 5( g) 3( g) ( g) 1. נתחיל בתאור ההליך בכלי: initial.341 eq..341 ξ ξ ξ ttal.341+ ξ y ξ.341 ξ ξ ξ.341+ ξ.341+ ξ.341+ ξ מכאן שקבוע שיווי משקל הינו: ξ P ξ P ( )( )
תרמודינאמיקה פתרון תרגיל מספר 9 Pl Pl + l 5( g) 3( g) ( g) 1. נתחיל בתאור ההליך בכלי: initial.341 eq..341 ξ ξ ξ ttal.341+ ξ y ξ.341 ξ ξ ξ.341+ ξ.341+ ξ.341+ ξ מכאן שקבוע שיווי משקל הינו: ξ P ξ P ( )( )
<4D F736F F D20FAF8E2E9EC203220E0F7E520EEE020FAF9F2E1>
 66-89 ד"ר דרורה קרוטקין אקונומטריקה למתקדמים א' תרגיל מס' 2 תרגיל חזרה על הפלטים.SPSS ו- GRETL, EVIEWS, STATA ) פלט (STATA שאלה נסמן: - q תפוקה k הון - l עבודה generate float lq= log(q) generate float
66-89 ד"ר דרורה קרוטקין אקונומטריקה למתקדמים א' תרגיל מס' 2 תרגיל חזרה על הפלטים.SPSS ו- GRETL, EVIEWS, STATA ) פלט (STATA שאלה נסמן: - q תפוקה k הון - l עבודה generate float lq= log(q) generate float
תוכן העניינים: פרק צמצומים ומימושים של פונקציות בוליאניות... 2 צמצומים של פונקציות באמצעות מפת קרנו:...2 שאלות:... 2 תשובות סופיות:... 4 צמצום
 תוכן העניינים: פרק 2 3 צמצומים ומימושים של פונקציות בוליאניות 2 צמצומים של פונקציות באמצעות מפת קרנו: 2 שאלות: 2 תשובות סופיות: 4 צמצום באמצעות שיטת 6:QM שאלות: 6 תשובות סופיות: 7 מימושים בעזרת פונקציות
תוכן העניינים: פרק 2 3 צמצומים ומימושים של פונקציות בוליאניות 2 צמצומים של פונקציות באמצעות מפת קרנו: 2 שאלות: 2 תשובות סופיות: 4 צמצום באמצעות שיטת 6:QM שאלות: 6 תשובות סופיות: 7 מימושים בעזרת פונקציות
1 מבחן משווה בפיסיקה כיתה ז' משך המבחן 90 דקות מבנה השאלון : שאלון זה כולל 4 שאלות עליך לענות על כולן.כתוב את הפתרונות המפורטים בדפים נפרדים וצרף אותם
 1 מבחן משווה בפיסיקה כיתה ז' משך המבחן 90 דקות מבנה השאלון : שאלון זה כולל 4 שאלות עליך לענות על כולן.כתוב את הפתרונות המפורטים בדפים נפרדים וצרף אותם בהגשה לטופס המבחן. חומרי עזר: 1.מחשבון. נספח הנוסחאות
1 מבחן משווה בפיסיקה כיתה ז' משך המבחן 90 דקות מבנה השאלון : שאלון זה כולל 4 שאלות עליך לענות על כולן.כתוב את הפתרונות המפורטים בדפים נפרדים וצרף אותם בהגשה לטופס המבחן. חומרי עזר: 1.מחשבון. נספח הנוסחאות
îáçï îúëåðú îñ' 1
 5 יח"ל מבחני חזרה במתמטיקה - במתכונת בחינות הבגרות לפי מיקוד הבחינה - קיץ 003 "כדי לקלוע למטרה צריך לכוון קצת למעלה ממנה" בעריכת: סרור אסעד אפריל 003 (úåãå ð 50) 'ñî úðåëúî ïçáî 'à ìç äøáâìà,øåùéîä úñãðä
5 יח"ל מבחני חזרה במתמטיקה - במתכונת בחינות הבגרות לפי מיקוד הבחינה - קיץ 003 "כדי לקלוע למטרה צריך לכוון קצת למעלה ממנה" בעריכת: סרור אסעד אפריל 003 (úåãå ð 50) 'ñî úðåëúî ïçáî 'à ìç äøáâìà,øåùéîä úñãðä
Microsoft Word - beayot hespek 4 pitronot.doc
 בעיות מילוליות - בעיות הספק.6 פתרון: נסמן: מספר המכשירים שתיקן טכנאי א' בשעה אחת (קצב עבודתו). ( ) כל אחד מהטכנאים תיקן מספר המכשירים שתיקן טכנאי ב' בשעה אחת (קצב עבודתו). 0 מכשירים, לכן: 0 שעות משך זמן
בעיות מילוליות - בעיות הספק.6 פתרון: נסמן: מספר המכשירים שתיקן טכנאי א' בשעה אחת (קצב עבודתו). ( ) כל אחד מהטכנאים תיקן מספר המכשירים שתיקן טכנאי ב' בשעה אחת (קצב עבודתו). 0 מכשירים, לכן: 0 שעות משך זמן
Microsoft Word - solutions.doc
 תחרות גיליס 009-00 הרי פוטר הגיע לחנות הדובשנרייה בהוגסמיד. הוא מגלה, שהכסף שלו מספיק בדיוק ל- סוכריות קוסמים ול- 5 קרפדות שוקולד, או בדיוק ל- 0 קרפדות שוקולד ול- 0 נשיקות מנטה, או בדיוק ל- 45 נשיקות מנטה
תחרות גיליס 009-00 הרי פוטר הגיע לחנות הדובשנרייה בהוגסמיד. הוא מגלה, שהכסף שלו מספיק בדיוק ל- סוכריות קוסמים ול- 5 קרפדות שוקולד, או בדיוק ל- 0 קרפדות שוקולד ול- 0 נשיקות מנטה, או בדיוק ל- 45 נשיקות מנטה
Microsoft Word - shedva_2011
 שיטות דיפרנציאליות ואינטגרליות הפקולטה להנדסה אוניברסיטת תל אביב גיא סלומון סטודנטים יקרים ספר תרגילים זה הינו פרי שנות ניסיון רבות של המחבר בהוראת חשבון דיפרנציאלי ואינטגרלי באוניברסיטת תל אביב, באוניברסיטה
שיטות דיפרנציאליות ואינטגרליות הפקולטה להנדסה אוניברסיטת תל אביב גיא סלומון סטודנטים יקרים ספר תרגילים זה הינו פרי שנות ניסיון רבות של המחבר בהוראת חשבון דיפרנציאלי ואינטגרלי באוניברסיטת תל אביב, באוניברסיטה
Microsoft Word - Questions Booklet Spring 2009
 אלגוריתמים 1 חוברת תרגילים נא לשלוח כל הערה לגיל כהן במייל cohen@cs.technion.ac.il מפתח שאלות לפי נושאים 1, 45, 54, 55, 56, 76 5, 63 :BFS :DFS מיון טופולוגי: 17, 31, 32, 57, 67, 68 2, 25, 26, 28, 50 21,
אלגוריתמים 1 חוברת תרגילים נא לשלוח כל הערה לגיל כהן במייל cohen@cs.technion.ac.il מפתח שאלות לפי נושאים 1, 45, 54, 55, 56, 76 5, 63 :BFS :DFS מיון טופולוגי: 17, 31, 32, 57, 67, 68 2, 25, 26, 28, 50 21,
Microsoft Word - 11_9006.doc
 בס"ד משרד החינוך המינהל למדע ולטכנולוגיה הפיקוח על מגמת הנדסת אלקטרוניקה ומחשבים ומגמת מערכות בקרה ואנרגיה מגמת הנדסת אלקטרוניקה ומחשבים תכנית לימודים במקצוע מעבדת תיב"ם ורכיבים מתכנתים סמל מקצוע 11.9006
בס"ד משרד החינוך המינהל למדע ולטכנולוגיה הפיקוח על מגמת הנדסת אלקטרוניקה ומחשבים ומגמת מערכות בקרה ואנרגיה מגמת הנדסת אלקטרוניקה ומחשבים תכנית לימודים במקצוע מעבדת תיב"ם ורכיבים מתכנתים סמל מקצוע 11.9006
סוג הבחינה: גמר לבתי ספר לטכנאים ולהנדסאים מדינת ישראל מועד הבחינה: אביב תשס"ט, 2009 משרד החינוך סמל השאלון: נספחים: א. נוסחאון במערכות תקשורת
 סוג הבחינה: גמר לבתי ספר לטכנאים ולהנדסאים מדינת ישראל מועד הבחינה: אביב תשס"ט, 2009 משרד החינוך סמל השאלון: 711913 נספחים: א. נוסחאון במערכות תקשורת ב' ההנחיות בשאלון זה מנוסחות בלשון זכר, אך מכוונות
סוג הבחינה: גמר לבתי ספר לטכנאים ולהנדסאים מדינת ישראל מועד הבחינה: אביב תשס"ט, 2009 משרד החינוך סמל השאלון: 711913 נספחים: א. נוסחאון במערכות תקשורת ב' ההנחיות בשאלון זה מנוסחות בלשון זכר, אך מכוונות
לסטודנטים במבוא מיקרו שבכוונתם לגשת למועד ב': אנו ממליצים לכם לפתור מחדש את המבחן שהיה במועד א'. עדיף לפתור בלי לראות את התשובות הנכונות מסומנות. לשם
 לסטודנטים במבוא מיקרו שבכוונתם לגשת למועד ב': אנו ממליצים לכם לפתור מחדש את המבחן שהיה במועד א'. עדיף לפתור בלי לראות את התשובות הנכונות מסומנות. לשם כך העלינו לפורטל שאלון מעורבל ללא שום סימונים עליו.
לסטודנטים במבוא מיקרו שבכוונתם לגשת למועד ב': אנו ממליצים לכם לפתור מחדש את המבחן שהיה במועד א'. עדיף לפתור בלי לראות את התשובות הנכונות מסומנות. לשם כך העלינו לפורטל שאלון מעורבל ללא שום סימונים עליו.
מקביליות
 PROMELA גרא וייס המחלקה למדעי המחשב אוניברסיטת בן-גוריון עדכון אחרון: 21:40 15/06/2013 2 שפת מ פ ר ט עם ס מ נ ט יק ה מוגדרת באופן מתמטי "שפת תכנות" למודלים המטרה: לאפשר גם לכאלה שאינם חוקרים בתחום לבנות
PROMELA גרא וייס המחלקה למדעי המחשב אוניברסיטת בן-גוריון עדכון אחרון: 21:40 15/06/2013 2 שפת מ פ ר ט עם ס מ נ ט יק ה מוגדרת באופן מתמטי "שפת תכנות" למודלים המטרה: לאפשר גם לכאלה שאינם חוקרים בתחום לבנות
פתרון שאלה 1: פתרון מוצע לבחינת מה"ט/משה"ח מערכות קירור ומיזוג אויר מועד א תשע"ח, חודש פברואר שנה 2018 מחבר: מר בוריס לחמן מכללת אורט סינגאלובסקי הערה
 פתרון שאלה 1: פתרון מוצע לבחינת מה"ט/משה"ח מערכות קירור ומיזוג אויר מועד א תשע"ח, חודש פברואר שנה מחבר: מר בוריס לחמן מכללת אורט סינגאלובסקי הערה: יש לתקן ערך בנתון השאלה כמות המים שנפלטים בהזעה ל- 3.6kg/hr
פתרון שאלה 1: פתרון מוצע לבחינת מה"ט/משה"ח מערכות קירור ומיזוג אויר מועד א תשע"ח, חודש פברואר שנה מחבר: מר בוריס לחמן מכללת אורט סינגאלובסקי הערה: יש לתקן ערך בנתון השאלה כמות המים שנפלטים בהזעה ל- 3.6kg/hr
<4D F736F F D20E9F8E5F9ECE9ED2C20F8E72720E4E2E3E5E320E4E7EEE9F9E920312C20E2F0E920E9ECE3E9ED2E646F63>
 מהדורה 04 18.01.10 עמוד 1 מתוך 7 שם הטופס: דוח בדיקה RF מספר דוח - 20345 לכבוד מס' טופס: טה- 0103 כ"א אדר תש"ע 07 מרץ 2010 מר עמירם רותם כיכר ספרא 13 ירושלים 94141 רכז תכנון וקרינה סביבתית מר עמירם רותם
מהדורה 04 18.01.10 עמוד 1 מתוך 7 שם הטופס: דוח בדיקה RF מספר דוח - 20345 לכבוד מס' טופס: טה- 0103 כ"א אדר תש"ע 07 מרץ 2010 מר עמירם רותם כיכר ספרא 13 ירושלים 94141 רכז תכנון וקרינה סביבתית מר עמירם רותם
הטכניון מכון טכנולוגי לישראל הפקולטה למדעי המחשב הוראות הגשה: ההגשה בזוגות. הוסיפו שמות, ת.ז., אי-מייל, תא אליו יש להחזיר את התרגיל ואת תשובותיכם לתרג
 הטכניון מכון טכנולוגי לישראל הפקולטה למדעי המחשב הוראות הגשה: ההגשה בזוגות. הוסיפו שמות, ת.ז., אי-מייל, תא אליו יש להחזיר את התרגיל ואת תשובותיכם לתרגיל, הדפיסו והגישו לתא הקורס בקומה. מבנה מחשבים ספרתיים
הטכניון מכון טכנולוגי לישראל הפקולטה למדעי המחשב הוראות הגשה: ההגשה בזוגות. הוסיפו שמות, ת.ז., אי-מייל, תא אליו יש להחזיר את התרגיל ואת תשובותיכם לתרגיל, הדפיסו והגישו לתא הקורס בקומה. מבנה מחשבים ספרתיים